ArmPi FPV 树莓派4B版本
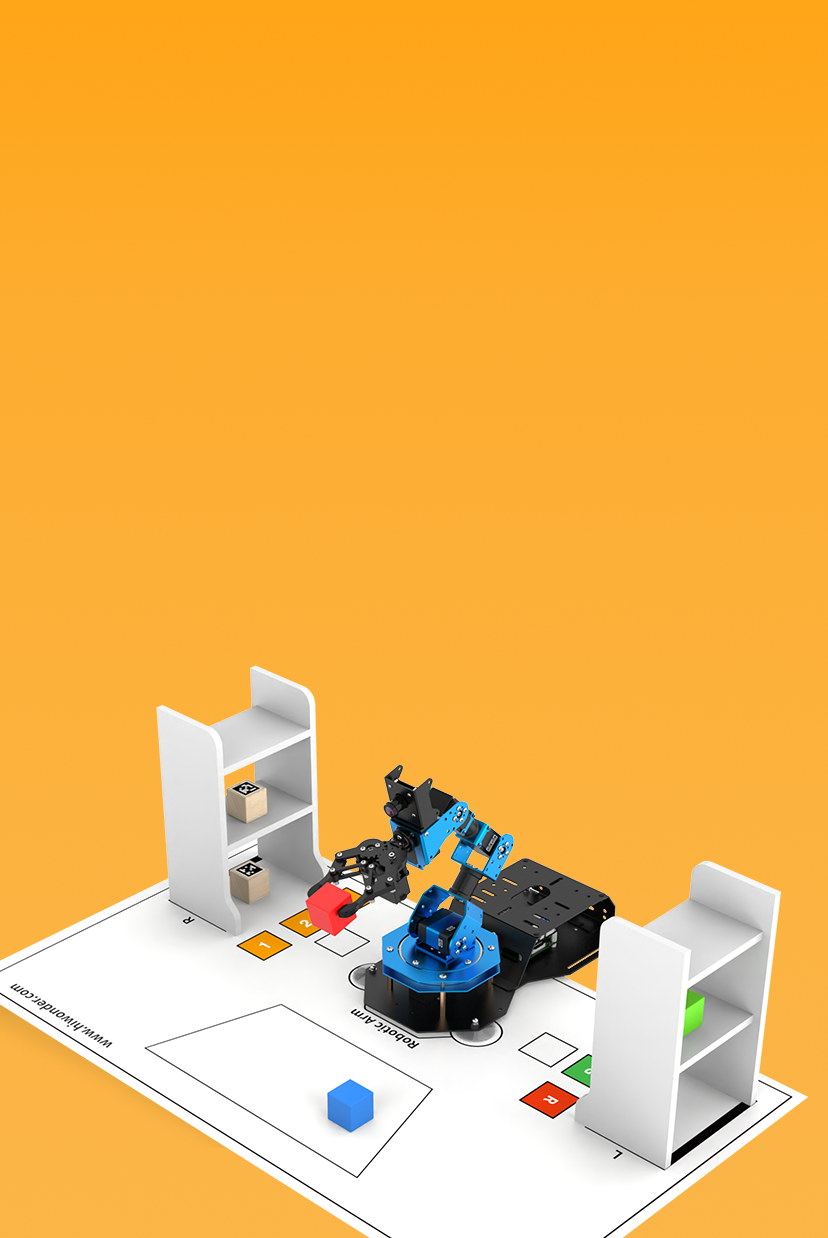
ArmPi FPV智能视觉机械臂以树莓派4B为主控,OpenCV为图像处理库,搭载高清120°广角摄像头,拥有第一视觉。它采用ROS机器人操作系统,内置 Movelt运动学。通过Python编程,它可以实现人脸识别、颜色追踪、码垛、 智慧仓储等多种Al视觉识别功能! 它不仅能满足用户对机器视觉、机械臂运动控制、力矩控制等算法的学习和验证,还为手眼协作、视觉抓取等二次开发提供快速、便捷的集成方案。我们提供学习资料,开放源代码,让您快速玩转AI智能机械臂!
ArmPi FPV智能视觉机械臂以树莓派4B为主控,OpenCV为图像处理库,搭载高清120°广角摄像头,拥有第一视觉。它采用ROS机器人操作系统,内置 Mov
目录
- 此课程为ArmPi FPV树莓派4B版本,ArmPi FPV 树莓派5课程点击跳转>>>
- 入门课程
- Linux系统简介及入门使用
- Python基础及入门实战
- OpenCV计算机视觉学习
- ROS开发入门
- 树莓派主板课程
- 树莓派4B与CM4版本区别说明
- 树莓派扩展板课程
- 远程连接系统桌面
- ArmPi FPV逆运动学基础及实战应用课程
- 机械臂运动规划及MoveIt仿真课程
- 动作编辑教学
- 单目相机课程
- ROS+OpenCV--AI视觉追踪
- ROS+OpenCV--AI视觉识别
- AI视觉创意玩法
- 智慧仓储课程
- 语音交互玩法课程
- 群发控制课程
- 拓展课程--传感器基础开发课程
- 拓展课程-传感器应用开发课程
- 无主板套餐课程
- 附录
- 软件下载
Linux系统简介及入门使用
Python基础及入门实战
OpenCV计算机视觉学习
ROS开发入门
树莓派主板课程
树莓派4B与CM4版本区别说明
树莓派扩展板课程
远程连接系统桌面
ArmPi FPV逆运动学基础及实战应用课程
机械臂运动规划及MoveIt仿真课程
单目相机课程
ROS+OpenCV--AI视觉追踪
ROS+OpenCV--AI视觉识别
智慧仓储课程
群发控制课程
拓展课程--传感器基础开发课程
拓展课程-传感器应用开发课程
无主板套餐课程
附录
软件下载