首页
品牌动态
01 背景介绍
机器人技术和人工智能科技的发展日新月异,从机器人运动学到机器视觉,再到深度学习和建图导航,特别是ROS框架下开发的项目逐渐成为主流之后,我们对于机器人教学平台的选择的标准也更高了。

看到正式发布后的JetHexa,我通过页面介绍和客服咨询,我完全确定这款独一无二的,可以建图导航深度学习识别的六足仿生机器人就是我需要的教学平台。
02 整体展示
JetHexa,很有分量,做工非常精美牢固,走线也很规整,超高颜值看上去都不太像教育类产品。幻尔在仿生机器人的研发上无人能出其右,六足形态更是他们看家本领,JetHexa的机体结构无懈可击,接下来就看它实际的运动性能。


03 上手体验
首先是步态上增加了波纹步态,而且可以和三角步态随意切换,机身高度、速度、倾斜角度等姿态也都能无级调节,这大大丰富了仿生机器人运动学的研究内容。18个自由度带来的机体运动性能远超其他形态的机器人,对于复杂地形的适应能力可谓傲视群雄。


内置的加速度传感器计算和各个关节的响应几乎没有延迟,实时姿态检测和调整不仅在多变的环境中确保通过性能,更为下面我们探讨的雷达建图有实际意义,确保机身平稳是雷达精确扫描的前提保障。


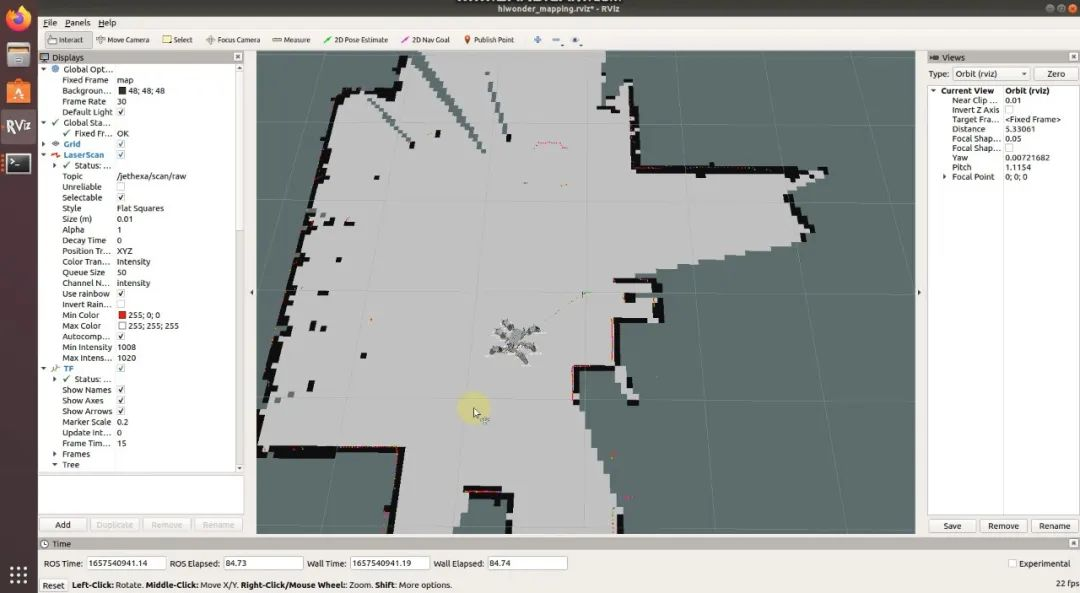
六足机器人的优势在于全地形通过能力,可以去到其他机器人到不了的地方,扫描范围可以更大,但难点就是六足如何平稳行进,让雷达的测量数据更精确,而幻尔在运动步态算法上的优势完美解决了这一问题。

深度相机的加入让建图导航水平再上一个台阶,三维视觉建图结合雷达激光扫描,一台设备全面满足机器人定位建图导航以及自主路径规划的学习需求,通过ROS框架,快速上手,先知其然才能知其所以然。
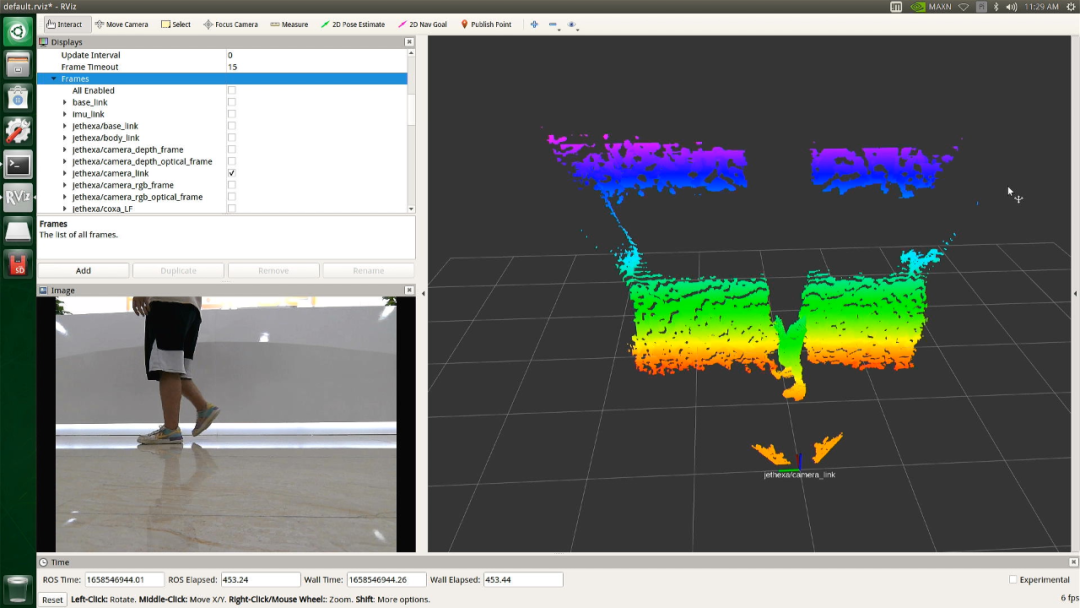
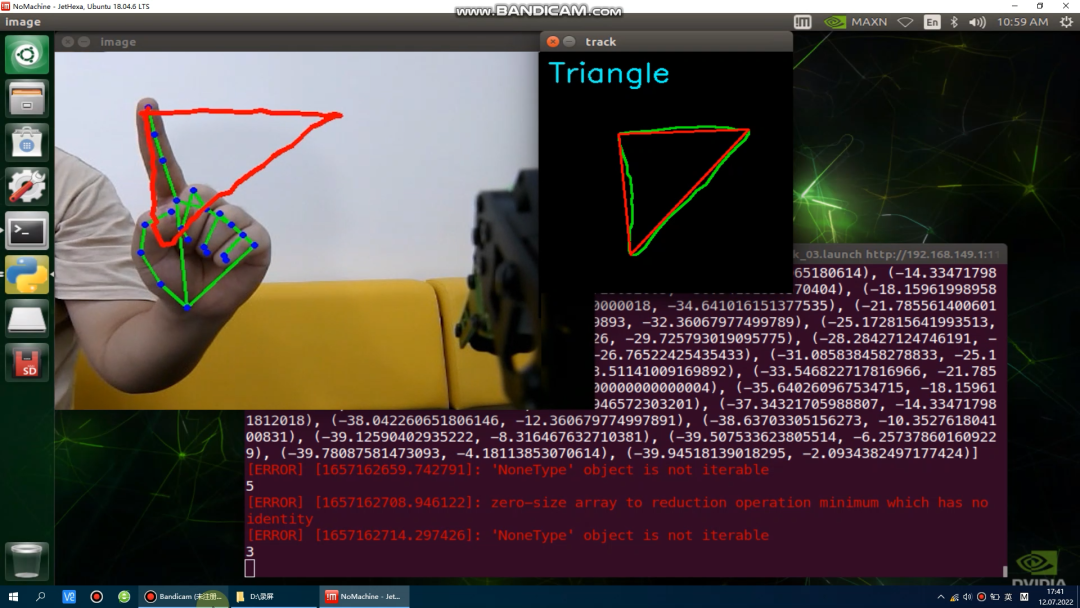
深度相机在物品识别和人体特征识别上的表现也远远好于其他产品,人机交互的场景应用开发变得丰富多彩,当然这也得益于Jetson Nano系统的强大算力,相信幻尔后续还会推出采用更强大的主控系统的机器人产品,在这里也期待一下。

04 总结
ROS机器人的学习肯定不能止步于APP的上手体验,在机体控制上幻尔的上位机软件简洁美观,标识清晰,滑竿和按键的设置覆盖所有可控单元。
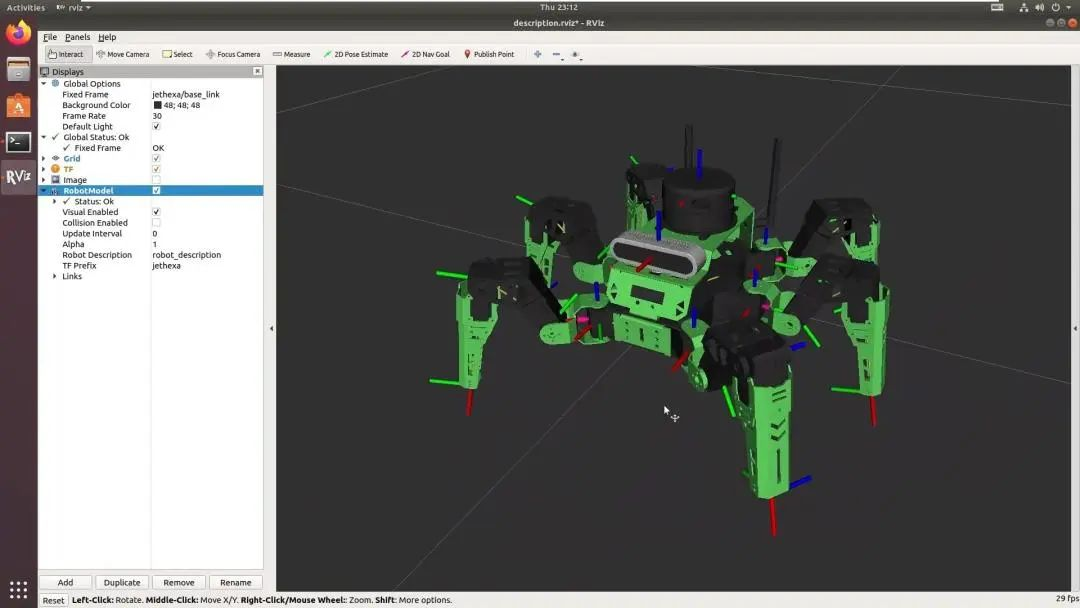
而ROS系统下仿真环境的搭建也大大降低了开发场景要求,尤其是幻尔提供的模型完美复制了JetHexa本体。程序代码部分由于幻尔提供了全部的源码包,上手难度也大大降低了。所以不论是硬件配置,还是软件开发,幻尔这款JetHexa都无愧于地表最强的称号!

