首页
品牌动态
目前市面上的桌面级机械臂五花八门,除了摄像头以外,还清一色的配置了多种传感器,以便于它们能表现得更加“智能”。但很快开发者发现,无论怎么增加传感模块的数量,都解决不了桌面级机械臂如今普遍存在的问题:很难突破二维平面的限制。
但这个问题却能在幻尔的JetArm机械臂上找到突破口。那JetArm到底和其他机械臂有哪些不同的地方呢?

01
JetArm大胆选择了一条行业内从未尝试过的路线:视觉升维。幻尔团队曾对于机械臂的感知方面做了很多尝试,从第三视觉的支架RGB摄像头到第一视觉的手眼合一设计。虽然转换视角后,机械臂已经能实现独树一帜的区域探测和自由抓取功能,但通过RGB图像获取的信息始终是有限的。我们可以从对比表中可以看到:
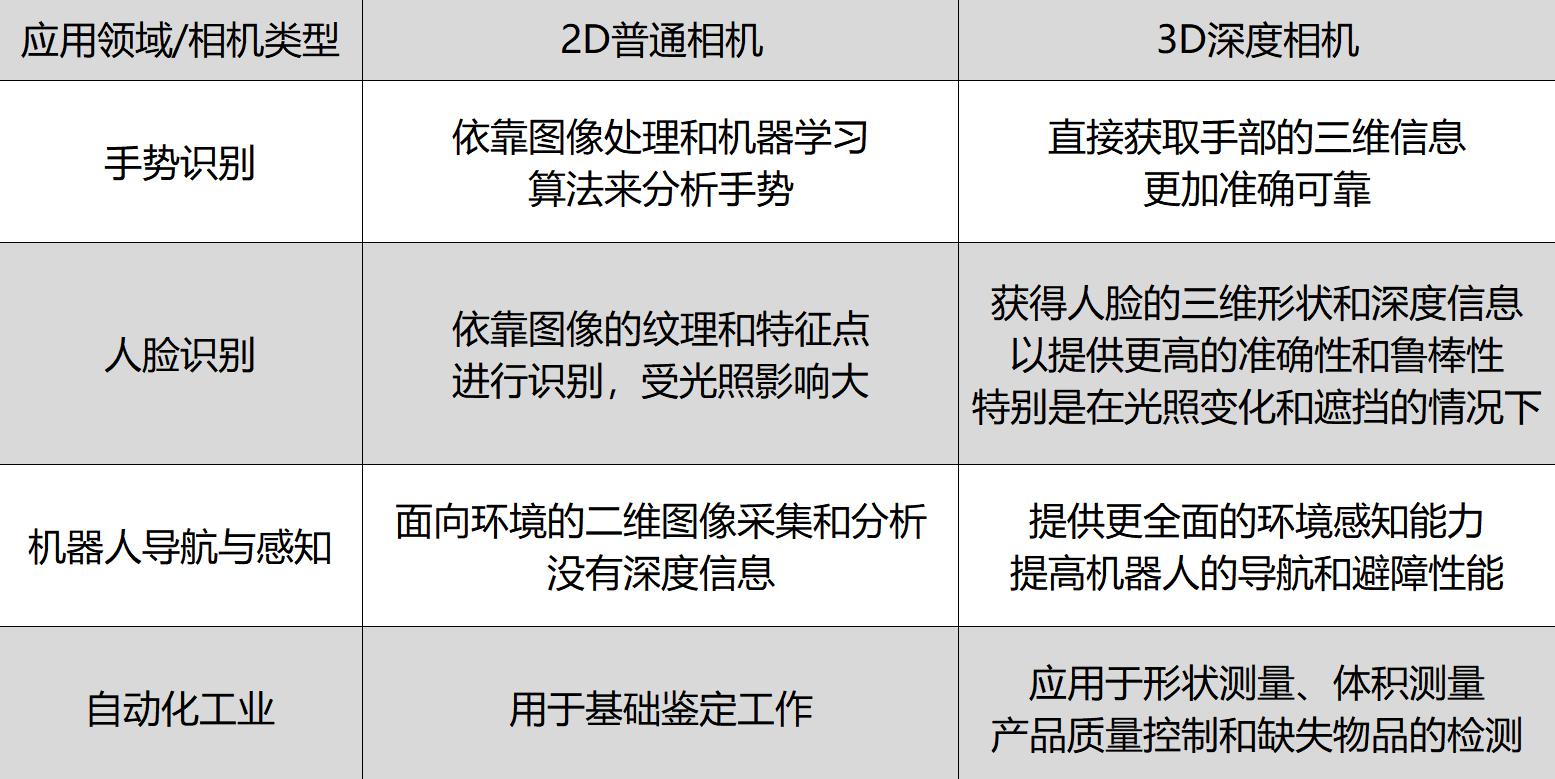
在同一个应用领域中,2D相机捕获到的信息已经满足不了一些特殊的情况;而3D相机的适应性更强,不仅能获取RGB图像,还能够直接获取物体的点云、形状、位姿等更多信息。这样一来,搭载不同摄像头的机械臂之间就有了明显差距。
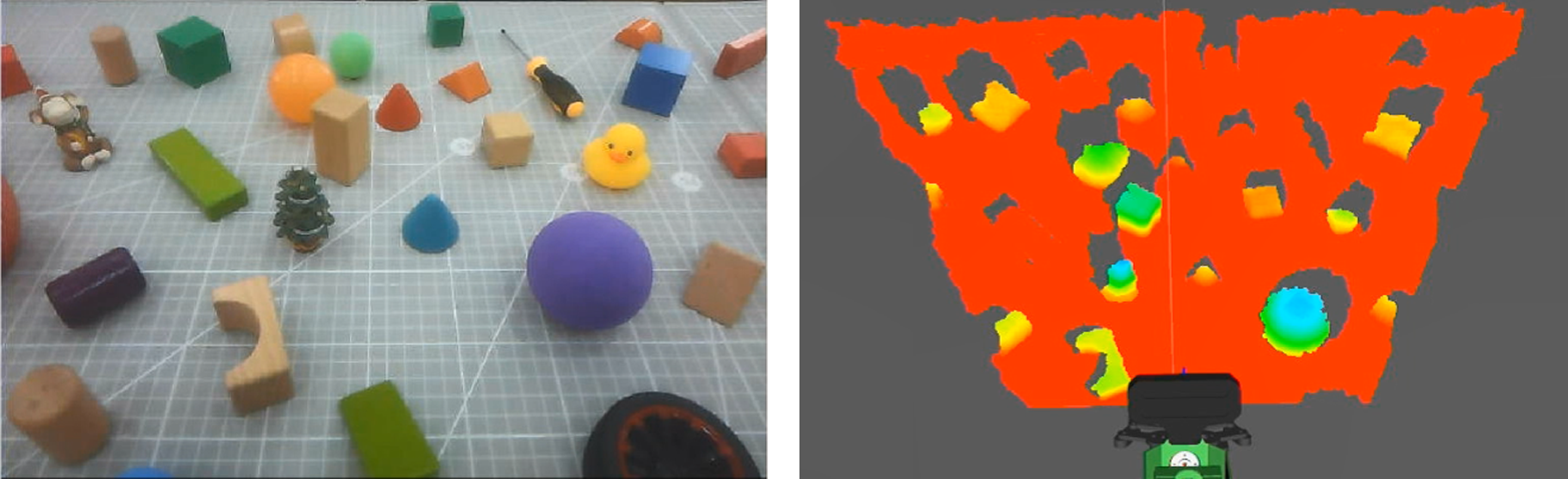
2D相机获取图像(左) 对比 3D相机获取图像(右)
JetArm可以完成的不只是平面内的抓取,而是一个能够根据获取的深度信息进行高度、距离判断的空间抓取。在深度技术的加持下,JetArm的功能上限将会更高。
02
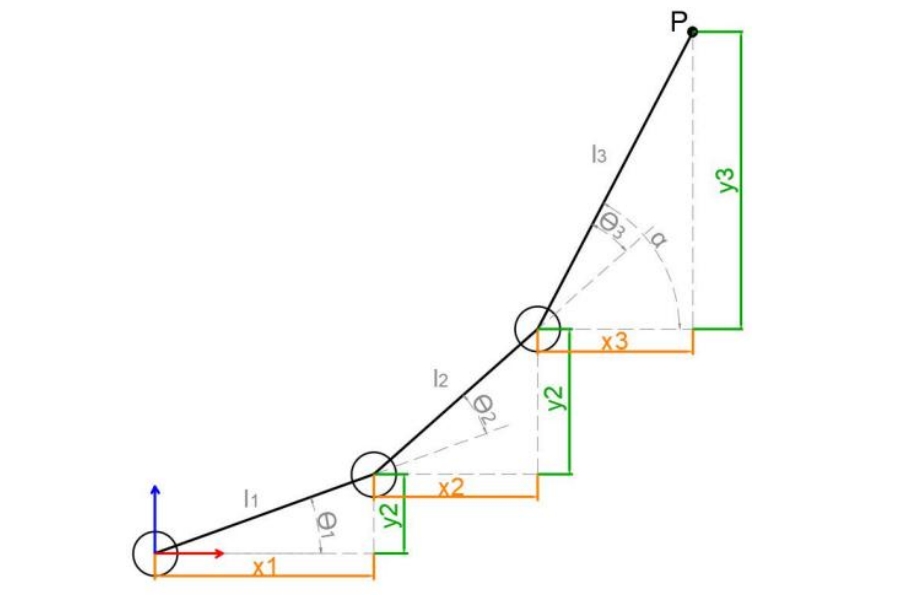
运动升级,算法进阶
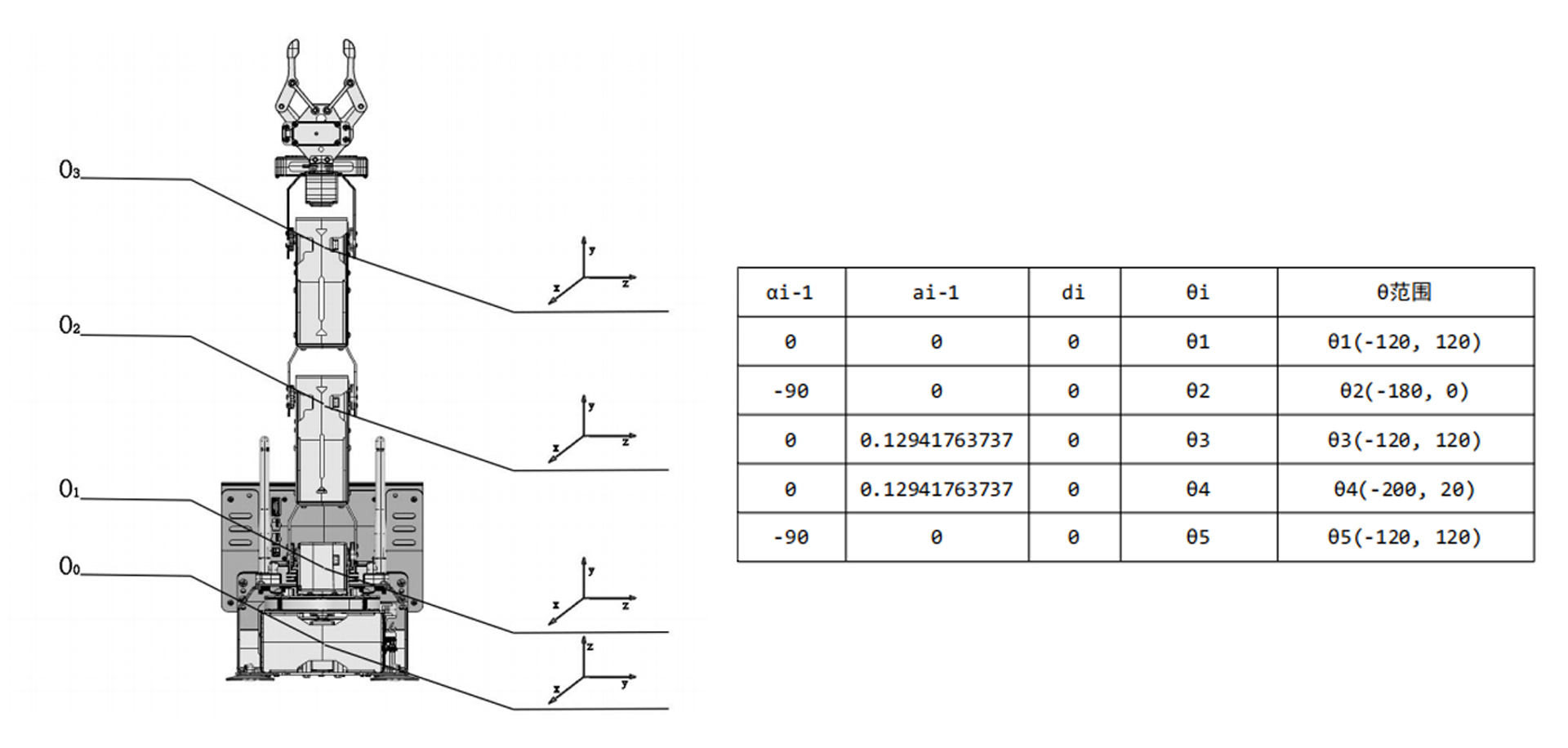
逆运动学的高效求解
03
控制迭代,决策分离
开发方案的自由选择
在以往的运行流程中,机器人的决策、控制工作只能依靠主板独自处理。当多个传感器同时启用,还要计算臂体舵机的运转角度时,主板的性能会被大幅分流,导致运行时会出现不流畅的现象。
基于此点,JetArm决定增加一个STM32机械臂控制板,专门用于控制舵机等部件。这样不仅能将主板的算力性能发挥到极致,机器人的实时性也得到了大幅提升,现在可以更流畅地完成动作执行。
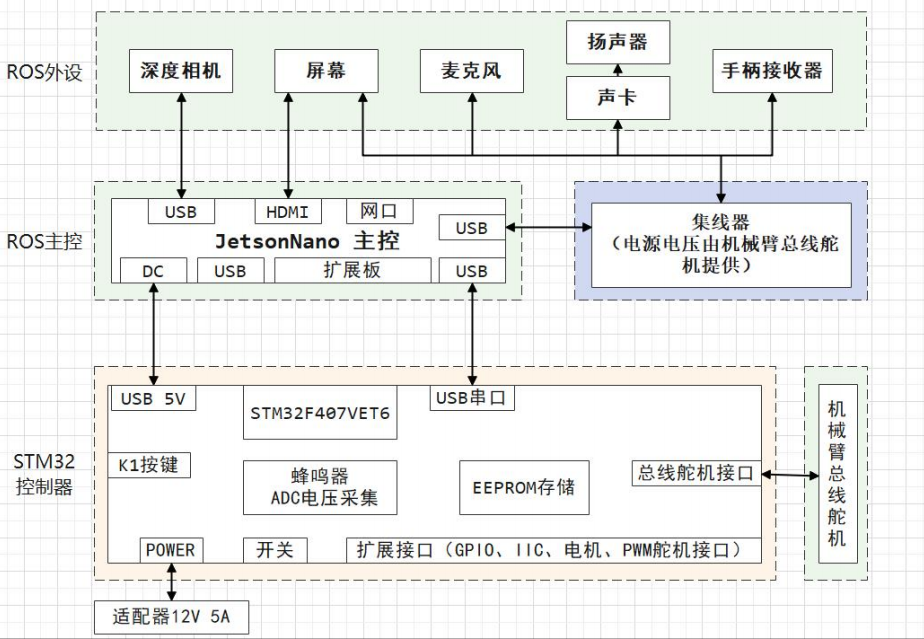
除了实时性,幻尔还希望JetArm可以帮助用户在不同的平台上去学习,以便进行更优质的开发。这时决策分离的另一个优势则体现了出来:用户可自由进行主控制板的升级。JetArm的控制和运算分别由单独的主板负责,不会因升级主控的拆卸影响机械臂的控制运作。
04
综上,独特想法和过硬技术造就了JetArm的与众不同。这种探索过程并不是一蹴而就,更多来自于幻尔对桌面级机械臂发展的不断思考。


