



专利设计 机械美学

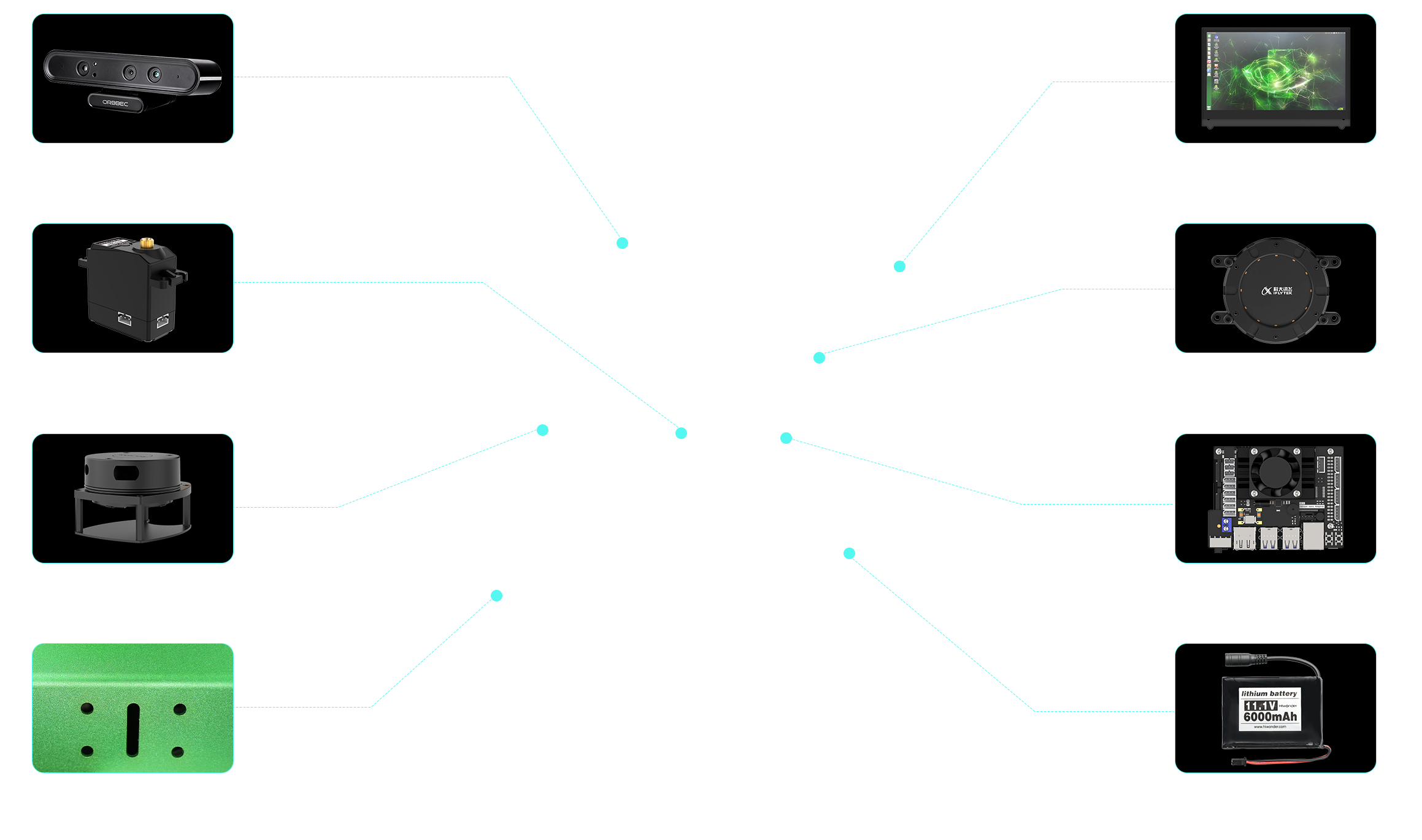
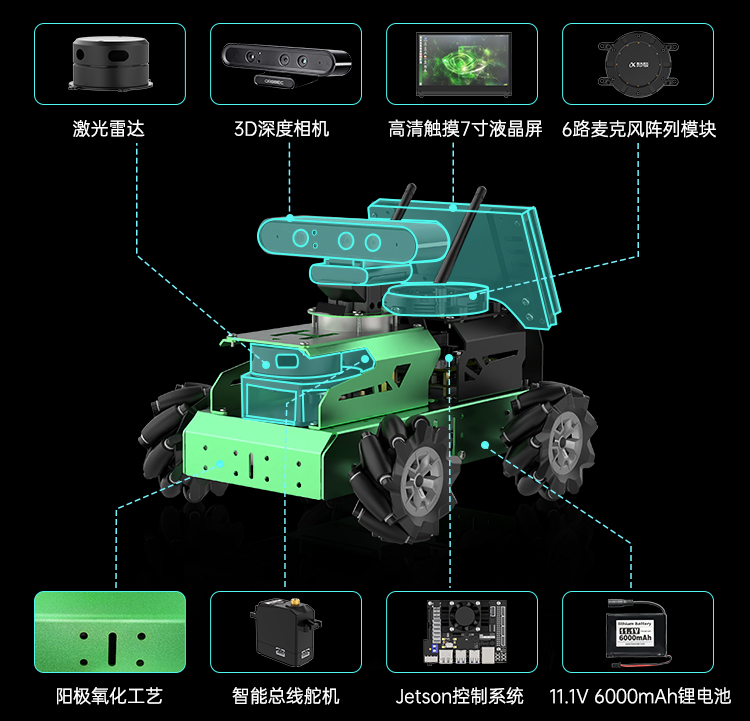
硬件特色



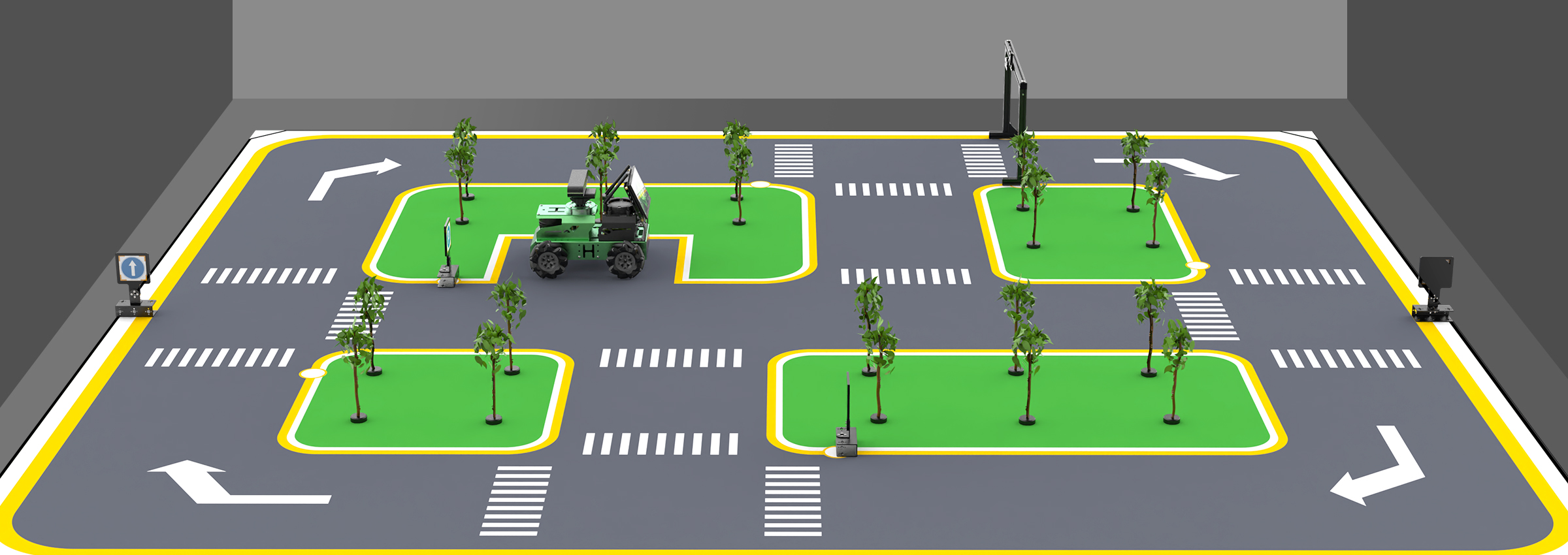
SLAM建图导航 路径规划
-
多种建图方式
-
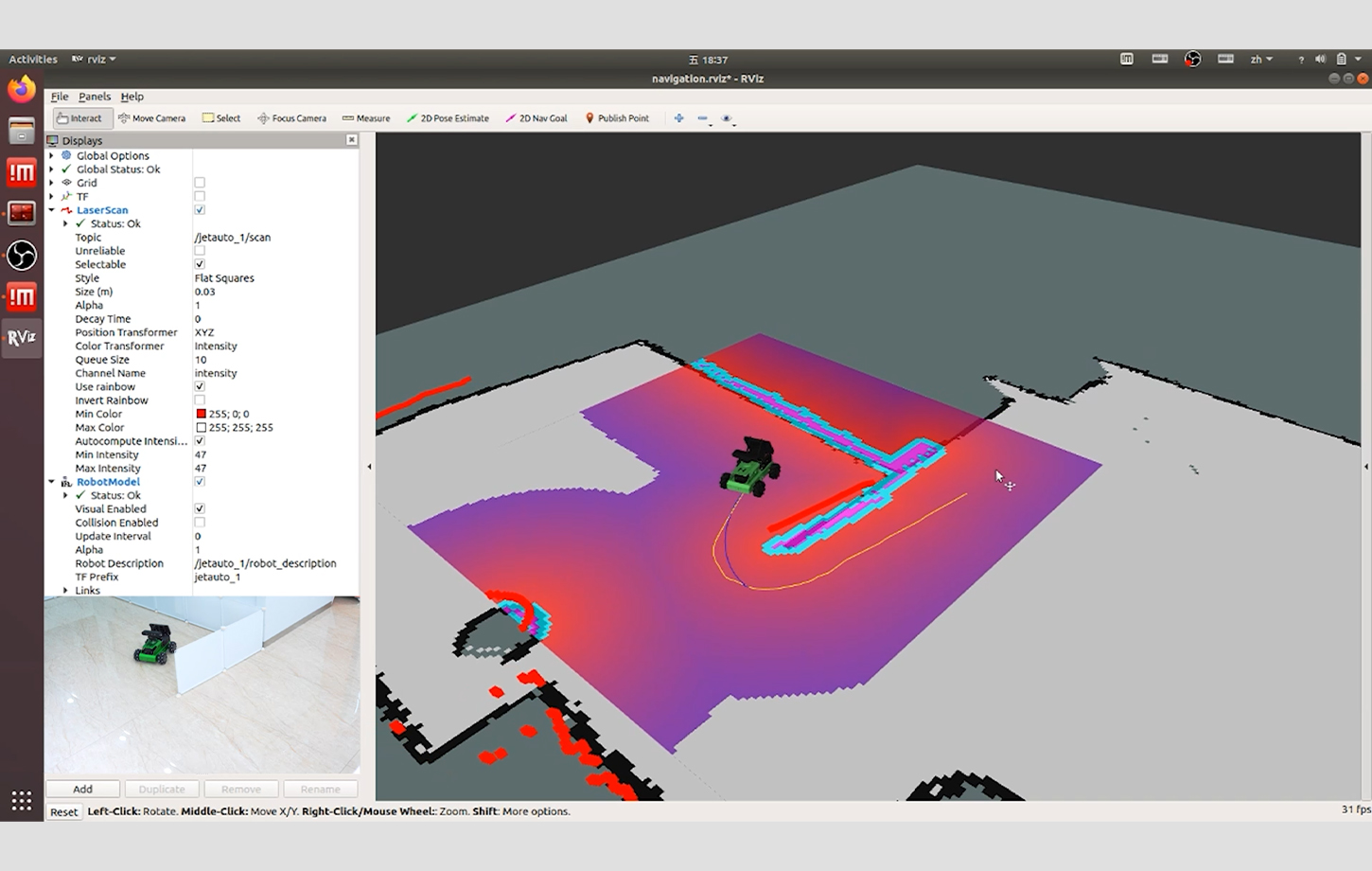
激光雷达导航
-
实时动态避障
-
TEB路径规划
-
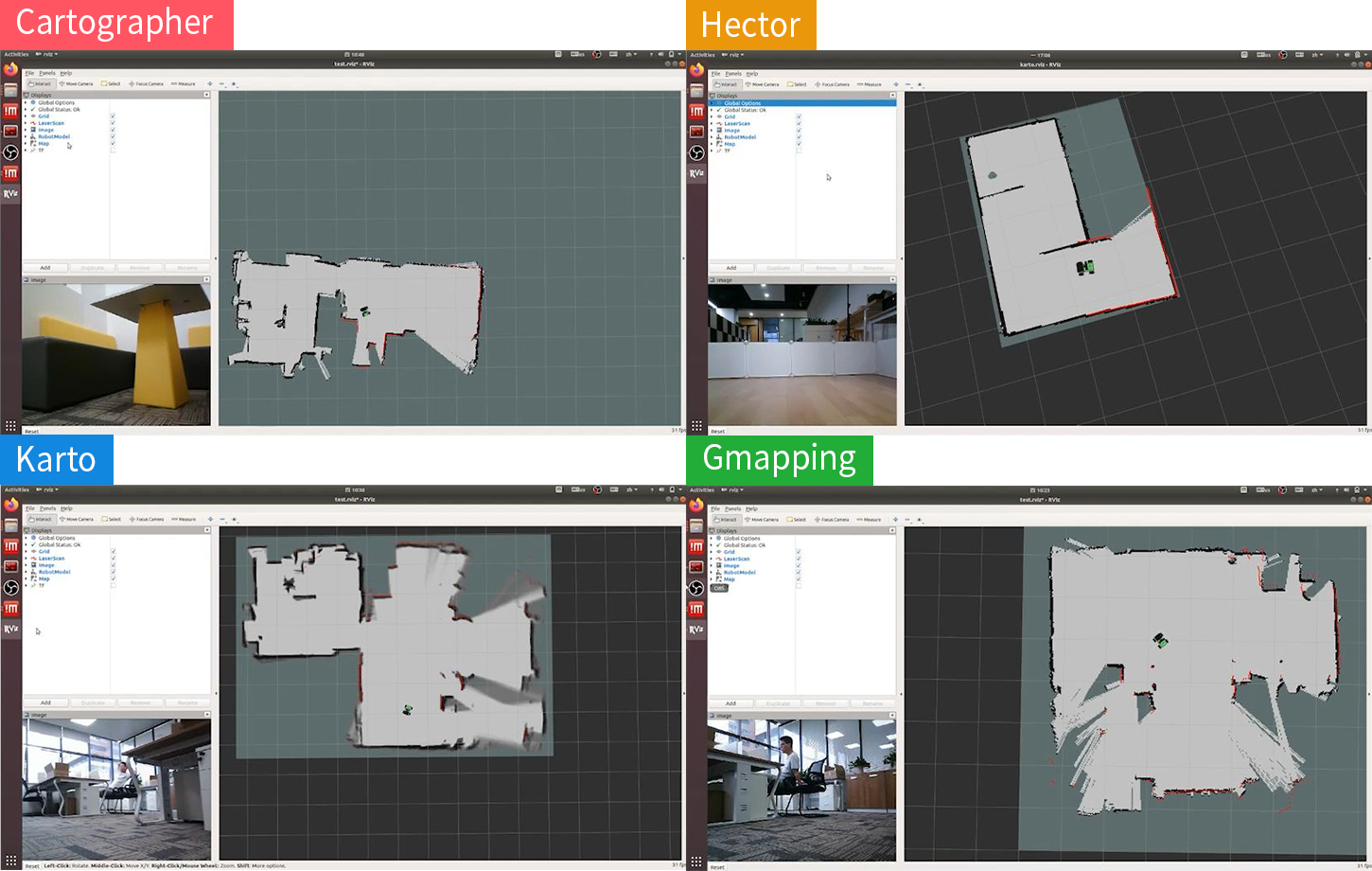
多种雷达建图方式,全面掌握雷达建图知识
-
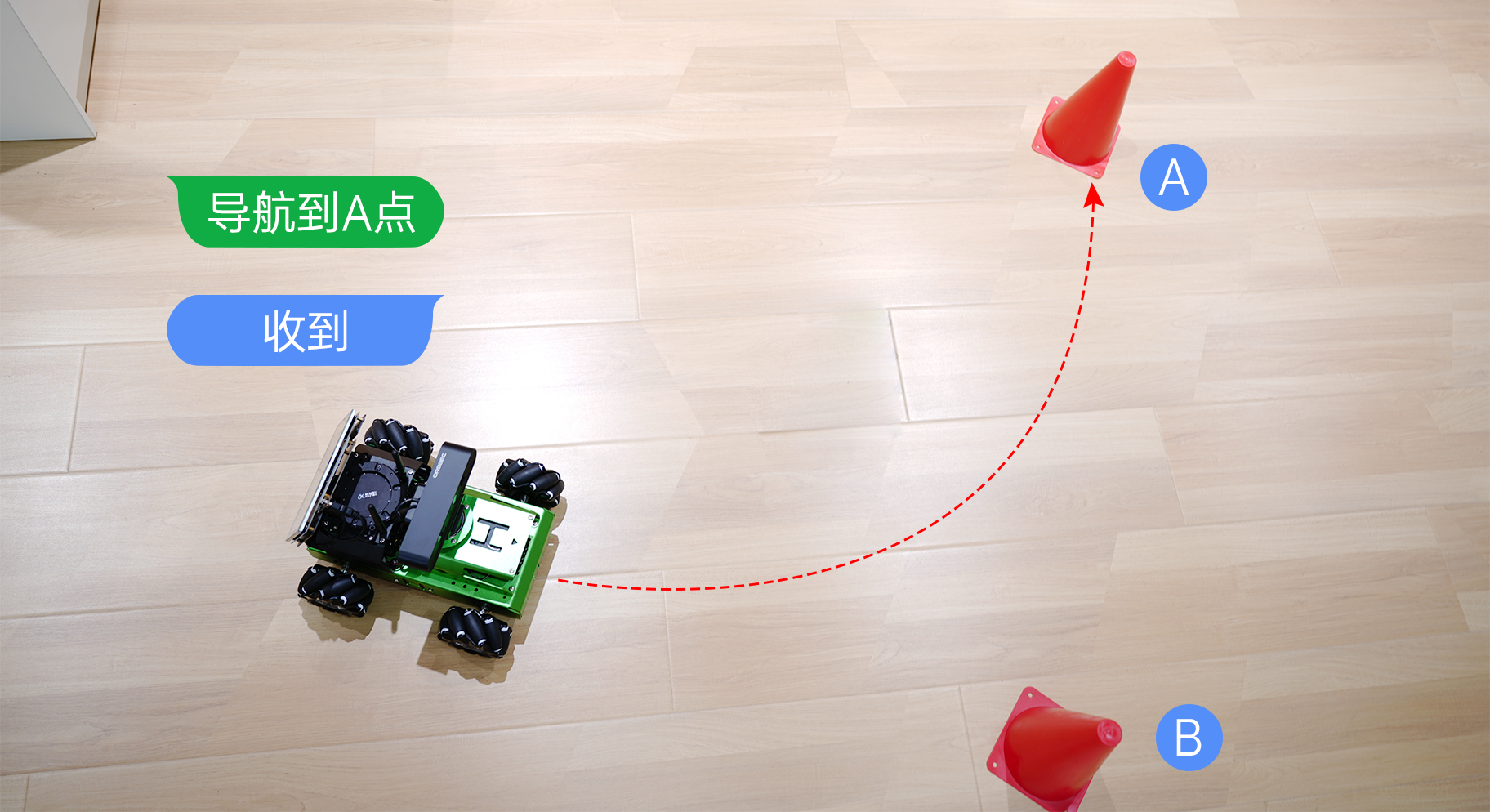
根据激光雷达建图,可实现单点与多点自主导航
-
.jpg)
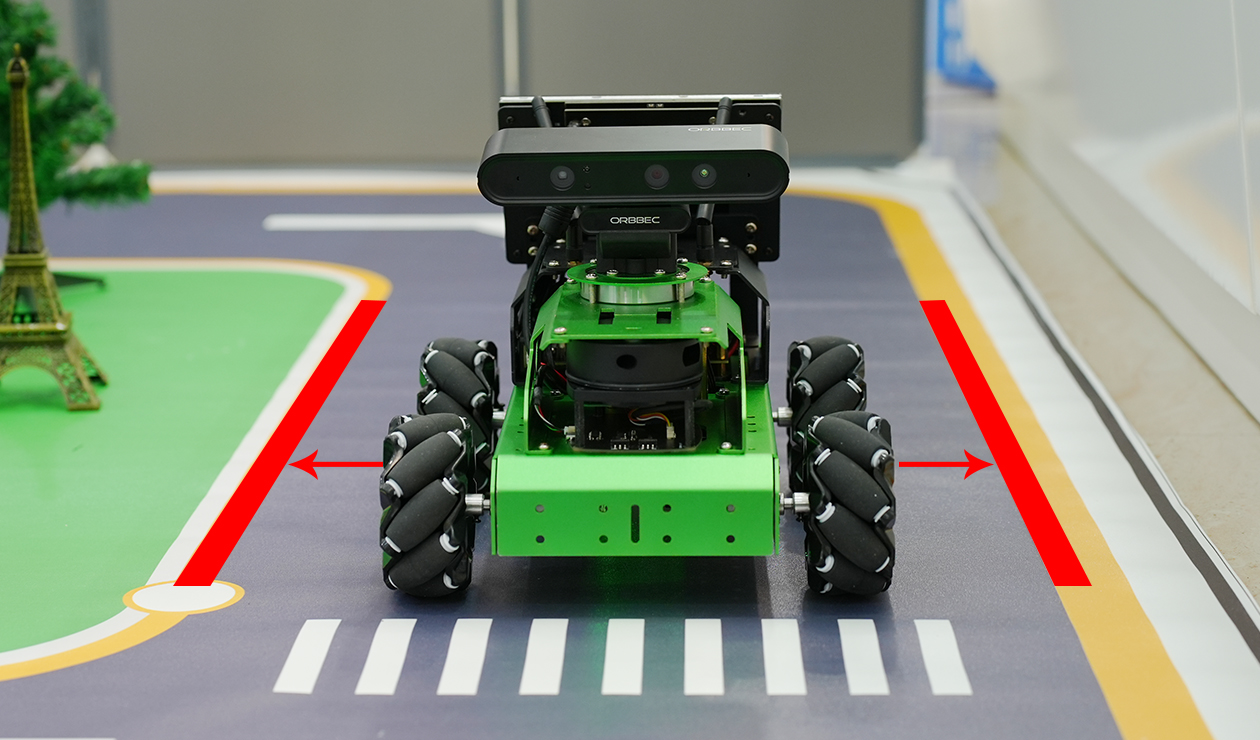
激光雷达实时检测周围环境,并在多点导航时避开障碍物
-
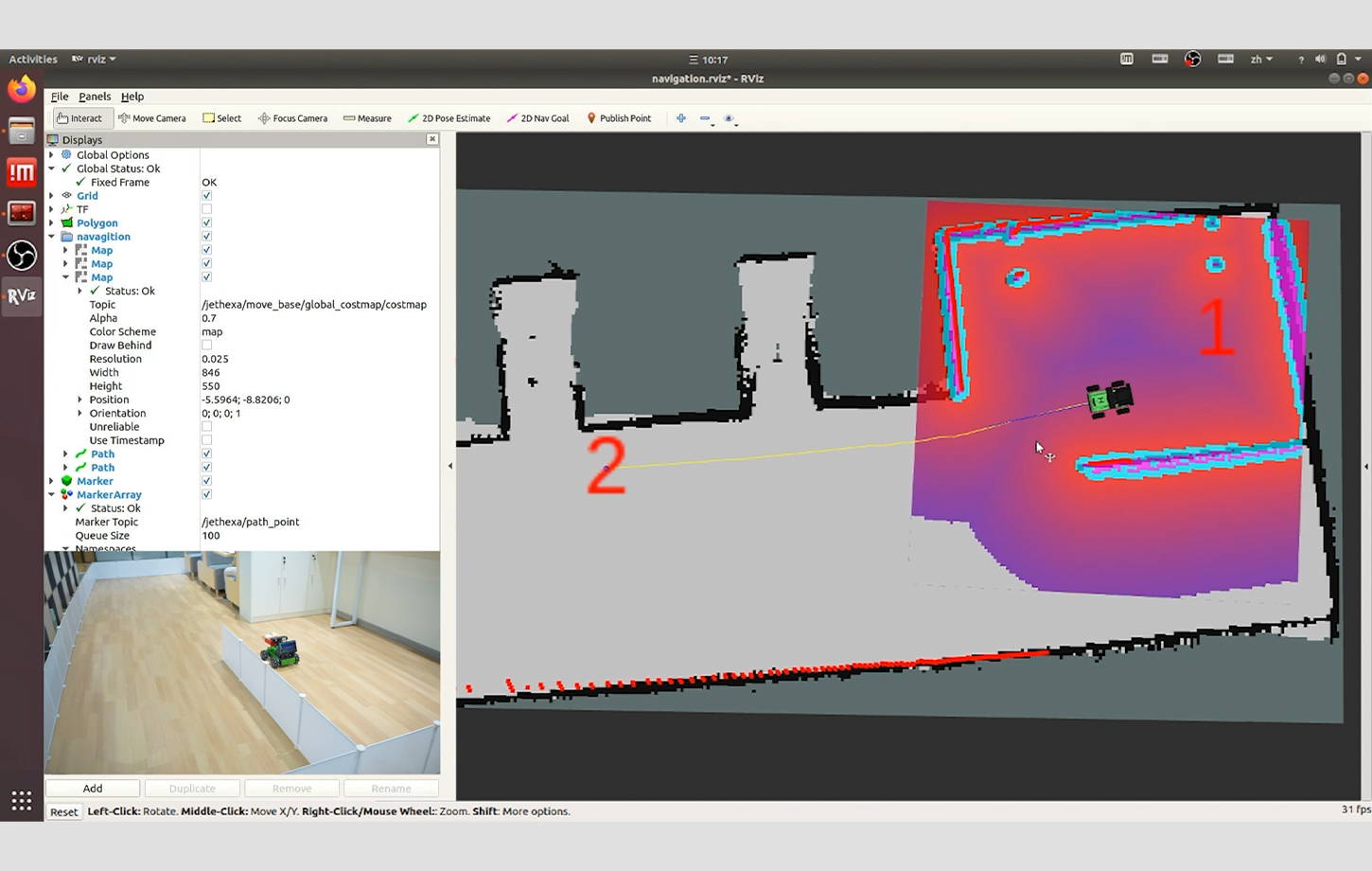
通过激光360°全向扫描,可以在未知环境中,实现自主路径规划
全向深度视觉感知
-
深度点云图像处理
-
三维视觉建图导航
-
MediaPipe深度开发
-
KCF视觉追踪
-
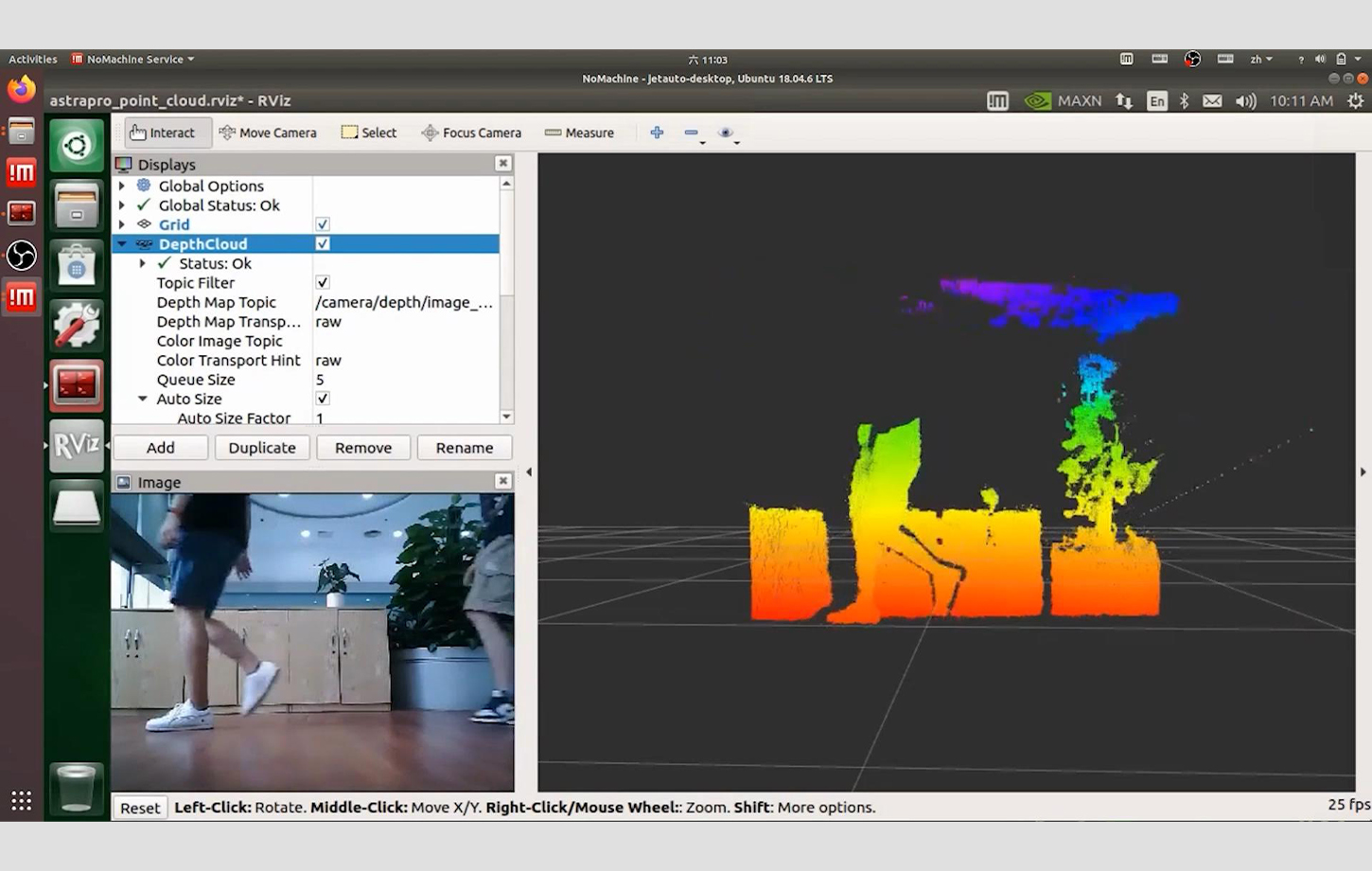
通过相应的API获取深度点云图像数据,为机器人提供行为参考
-
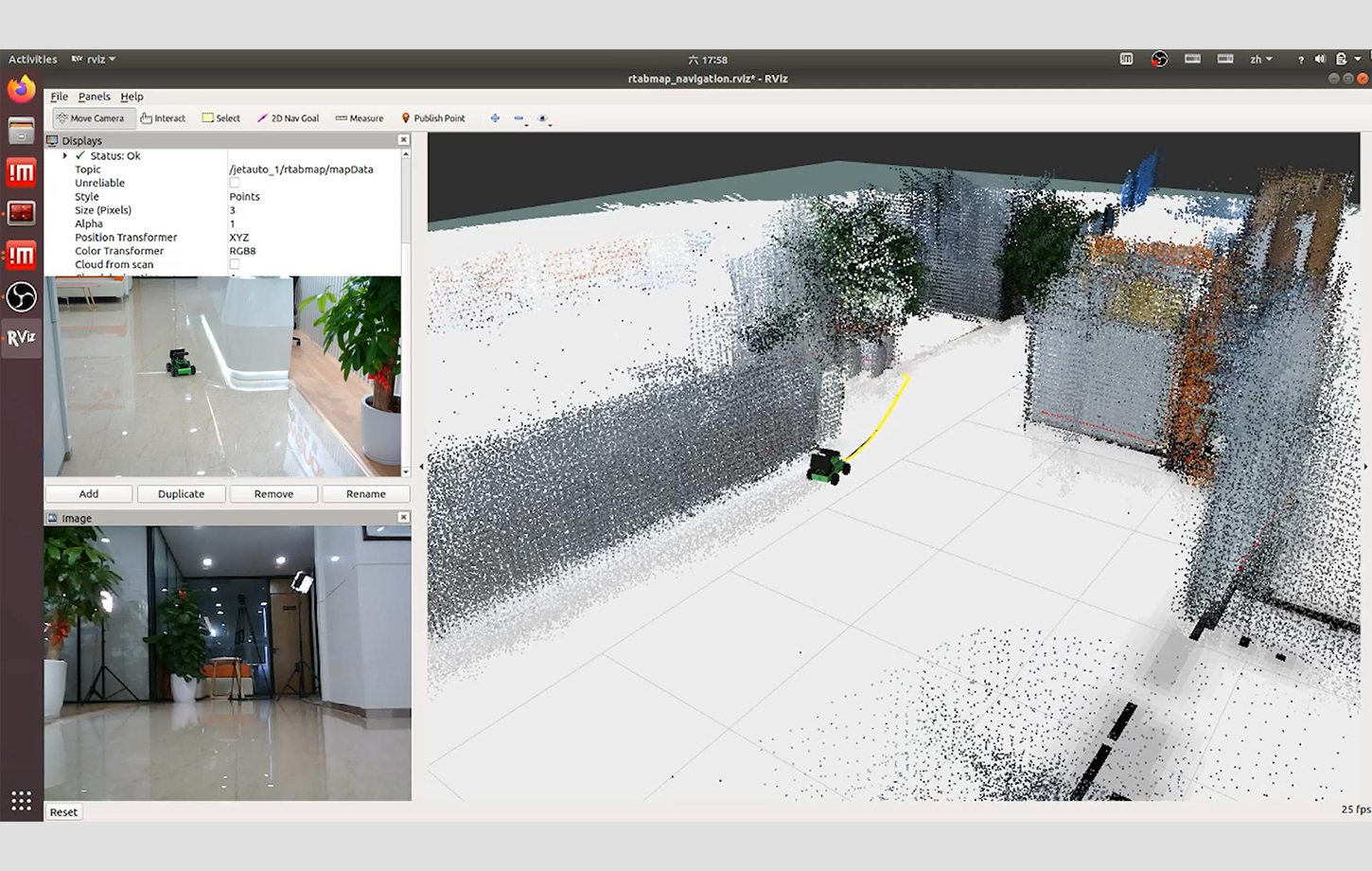
支持RTAB纯视觉和视觉雷达融合的三维彩色建图,支持全局重定位
-
.jpg)
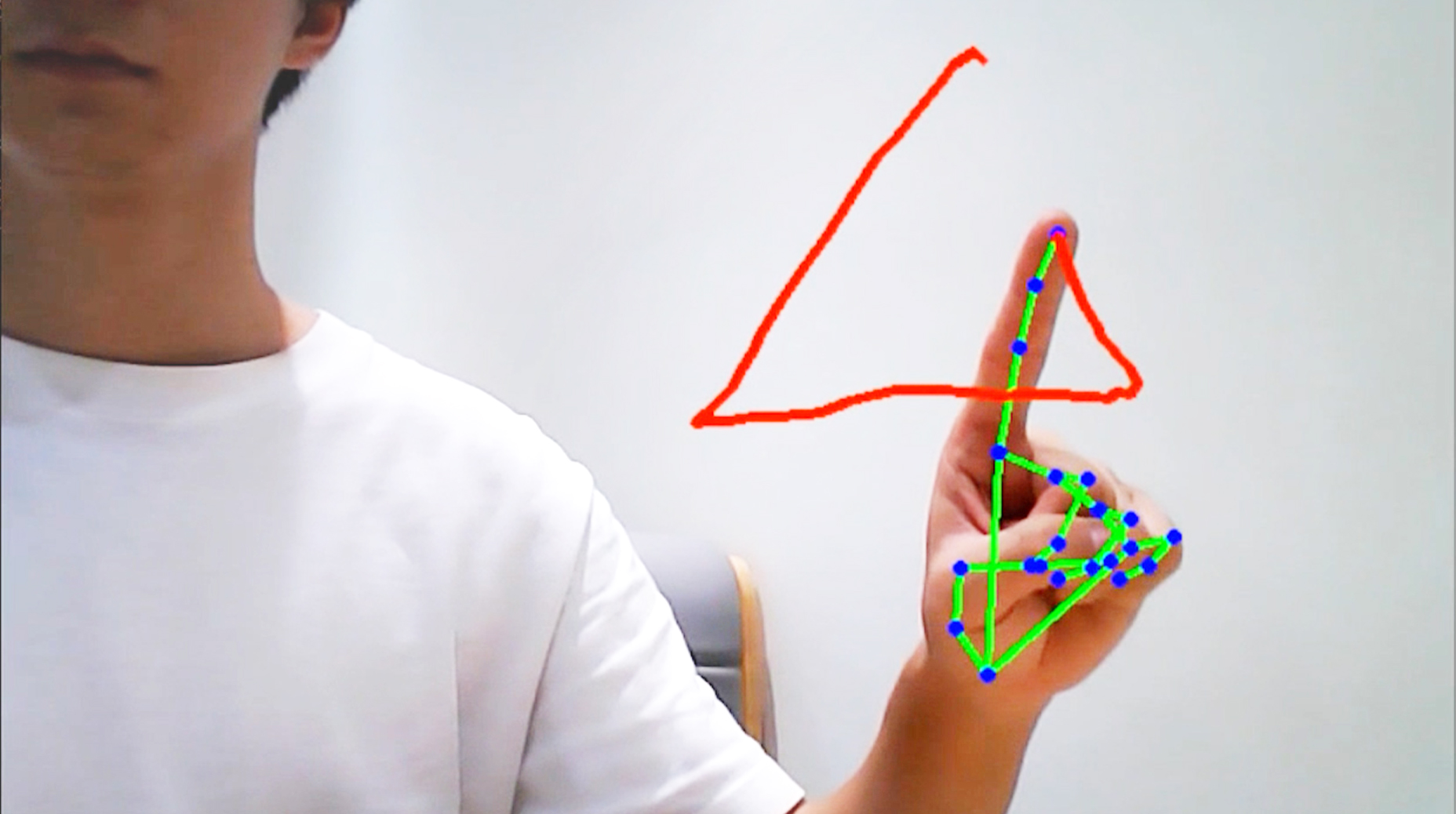
快速识别指尖轨迹、骨架、表情等人体特征信息,带来全新AI交互体验
-

基于图像的相关KCF滤波算法,可以跟踪选定图像中的任意目标
深度学习 自动驾驶



智能语音交互 趣味互动
JetAuto结合远场语音模块,可实现声源定位和语音交互、语音导航等智能交互功能,您也可以给JetAuto设计更多有趣的语音交互玩法。
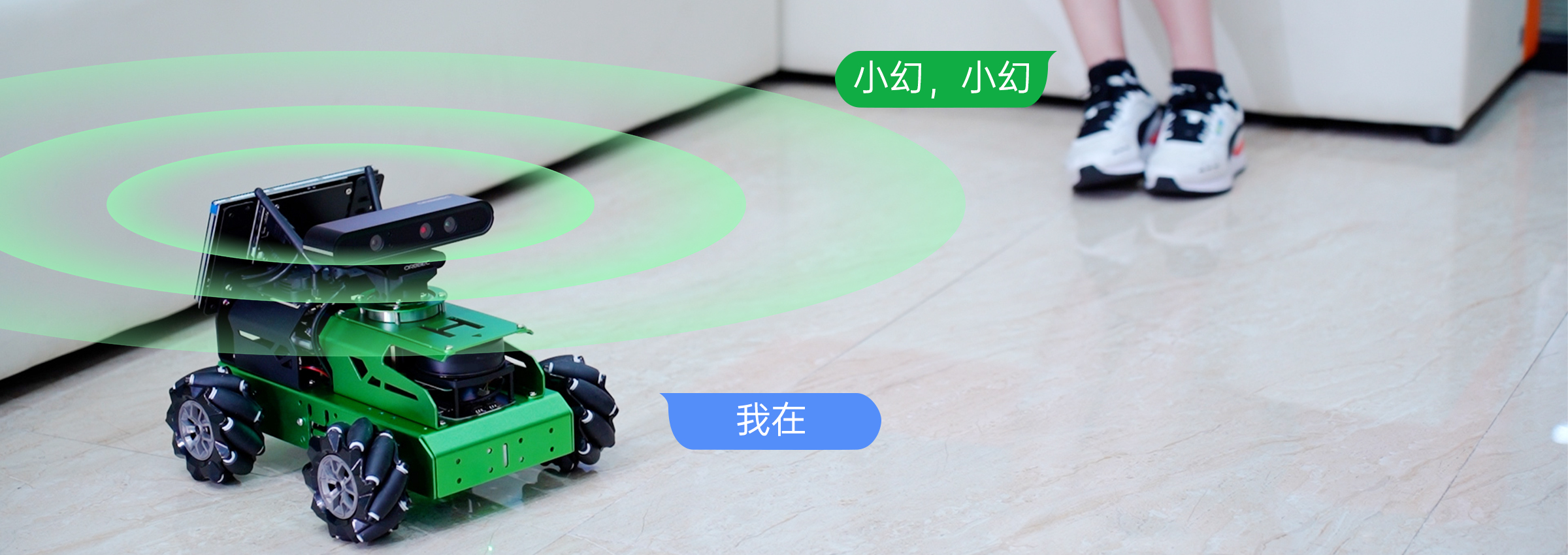


语音交互
语音导航
人体特征识别 AI体感交互
JetAuto可提取人体不同特征图像,感知你想表达的“意思”,从而实现骨架识别、指尖检测、面部检测、三维检测识别等功能。
-
指尖轨迹识别
-
肢体控制
-
三维人脸检测

Gazebo仿真
JetAuto采用ROS框架开发,并支持GAZEBO仿真,在虚拟环境中进行机器人的控制及算法的验证,降低了对实验环境的要求,提高了实验效率。
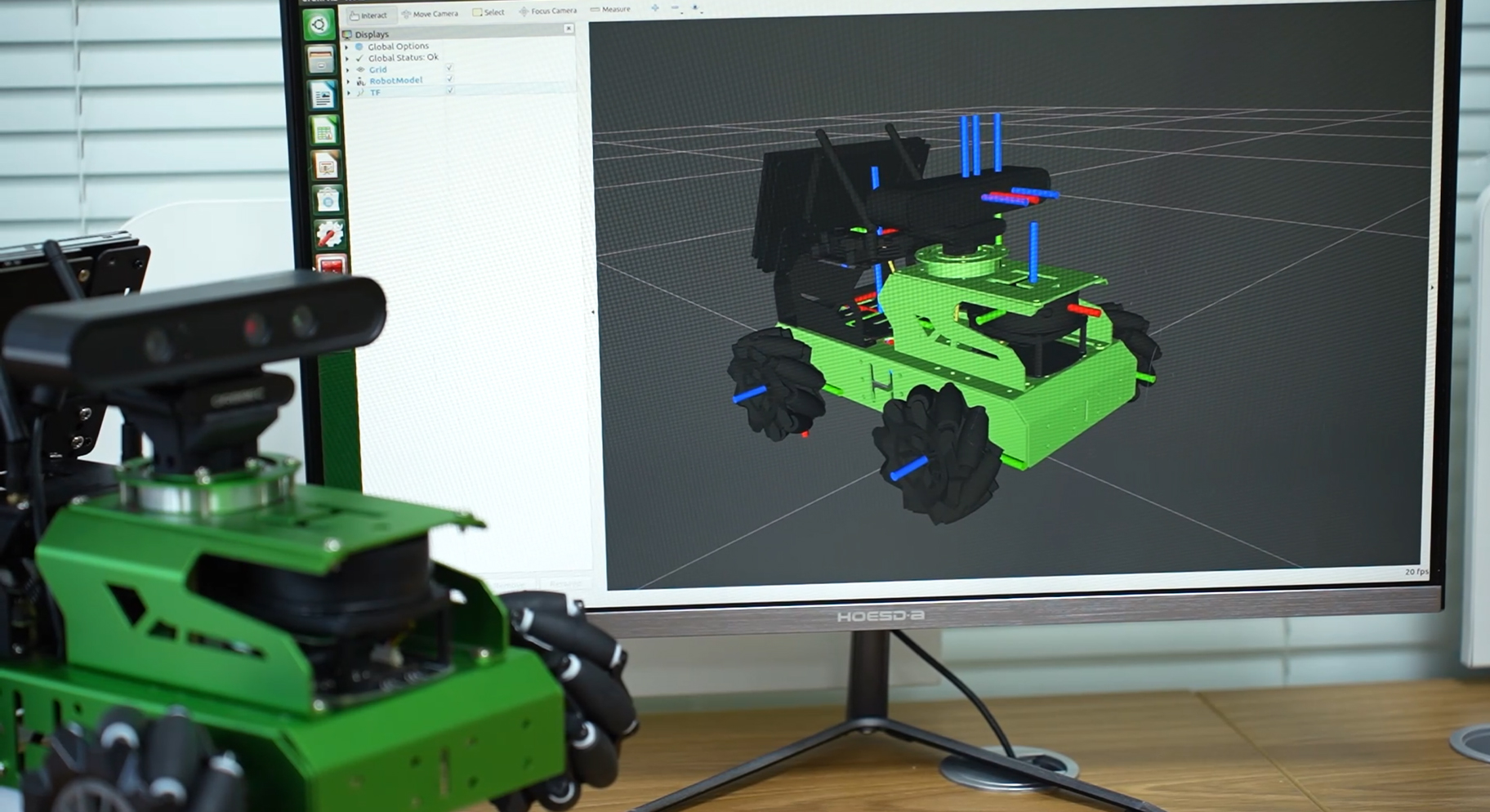
机体模拟控制
通过机器人模拟控制,进行运动算法前期验证, 避免算法错误导致的实体机器人损坏。
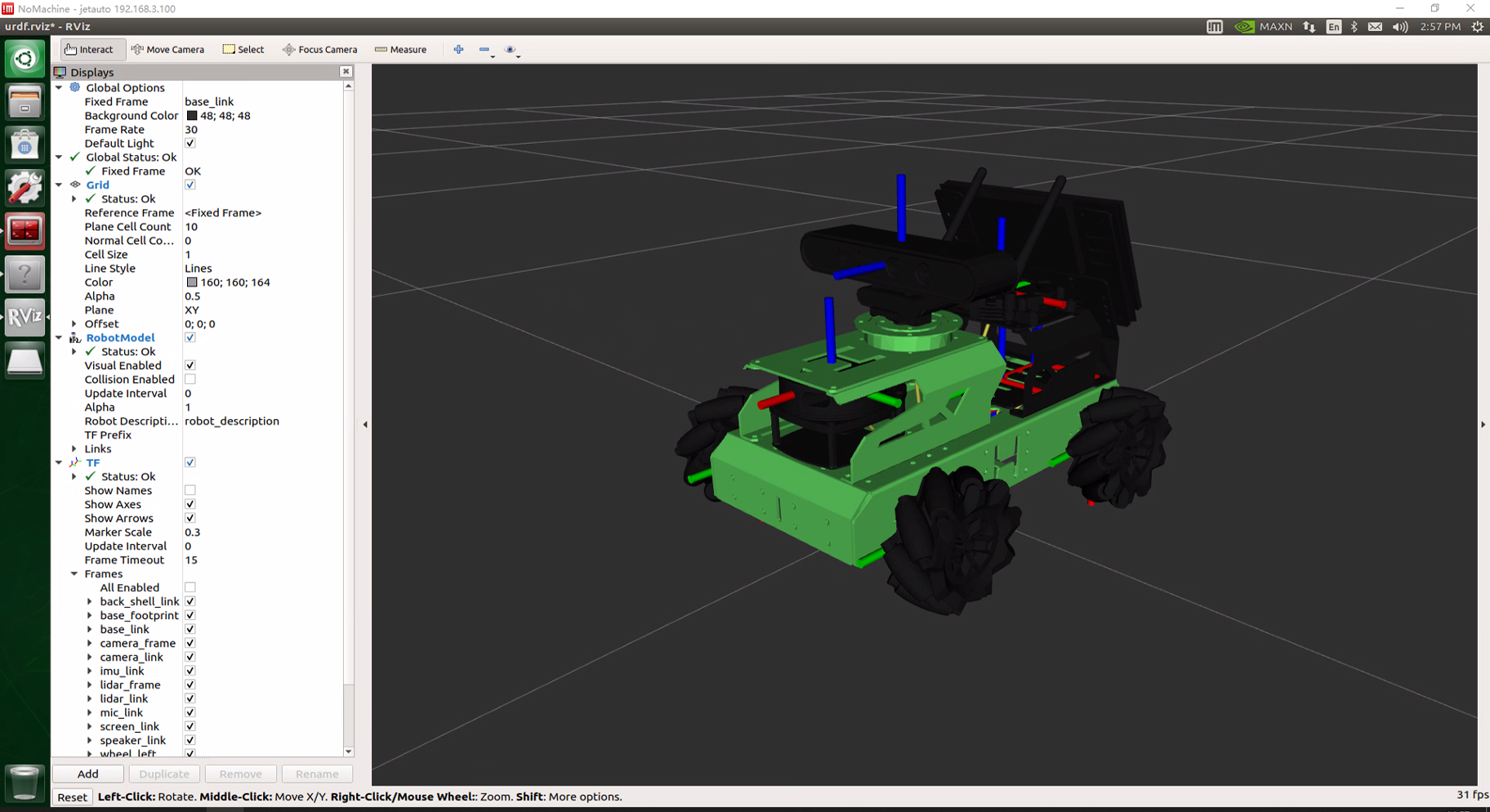
数据可视化
通过rviz可视化观察建图导航的效果,方便调试,改进算法。
跨平台互联操控
JetAuto可以使用3种方式进行控制,支持安卓/iOS手机APP控制、PS2手柄控制。



手机APP控制

无线手柄控制

建图导航APP控制
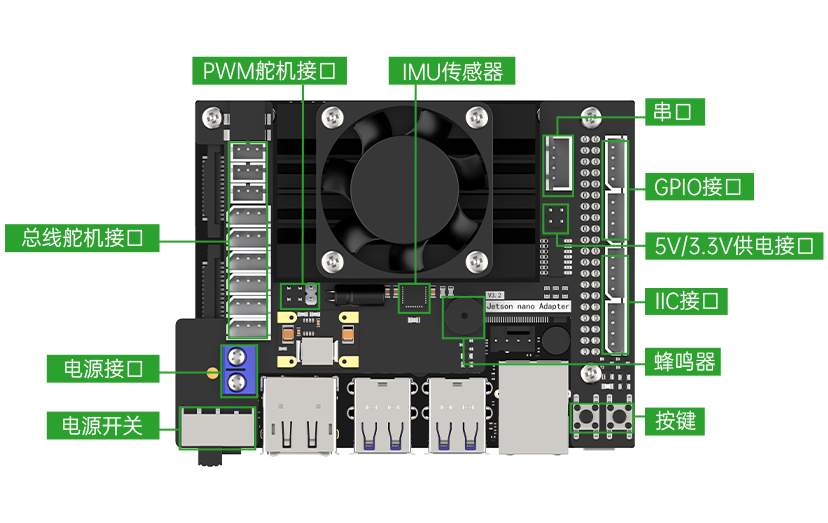
高性能主控
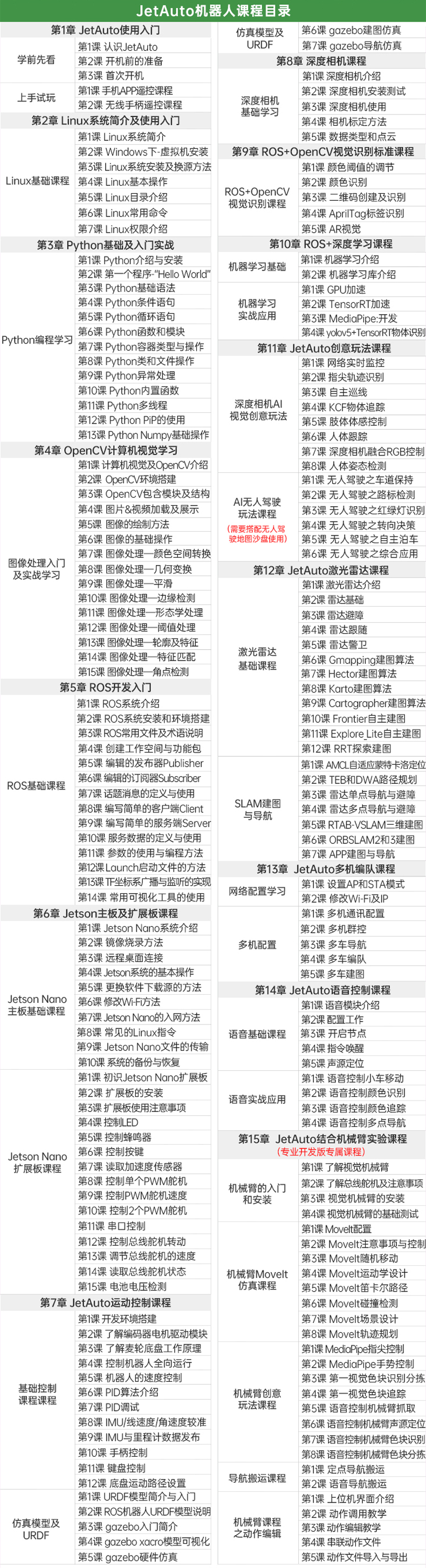
教程详细,开放源码
教程详细
配备精心研发的真人视频课程和丰富的学习资料,内容由浅入深,带您轻松学习。
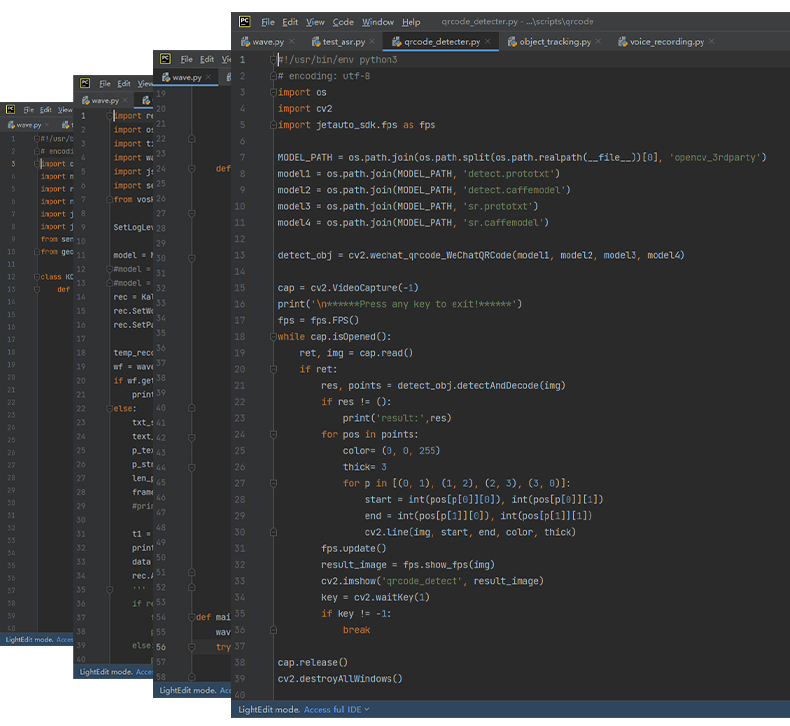
开放Python源码
我们为您提供Python的源代码,并对代码做了详细注释,方便您去学习。
提供众多配件
玩法道具

麦克风阵列
手柄

参数详情
| 产品尺寸 | 302*260*256mm(麦轮),306*246*286mm(履带) |
| 产品重量 | 3.5kg(麦轮) |
| 机体材料 | 全金属硬铝合金支架(阳极氧化处理) |
| 电池 | 11.1V 6000mAh锂电池 |
| 续航时间 | 60min |
| 硬件部分 | ROS控制板和ROS扩展版 |
| 操作系统 | Ubuntu 18.04 LTS+ROS Melodic |
| 软件 | iOS/安卓手机APP |
| 通信方式 | USB/Wi-Fi/以太网 |
| 编程工具 | Python/C/C++/JavaScript |
| 储存 | 32G TF卡 |
| 舵机型号 | HTS-20H智能总线舵机 |
| 控制方式 | 手机控制/手柄控制 |
| 旗舰版发货尺寸 | 长335*宽320高*225 (mm) |
| 旗舰版整体重量(含包装) |
约4.5kg |
