




观看视频
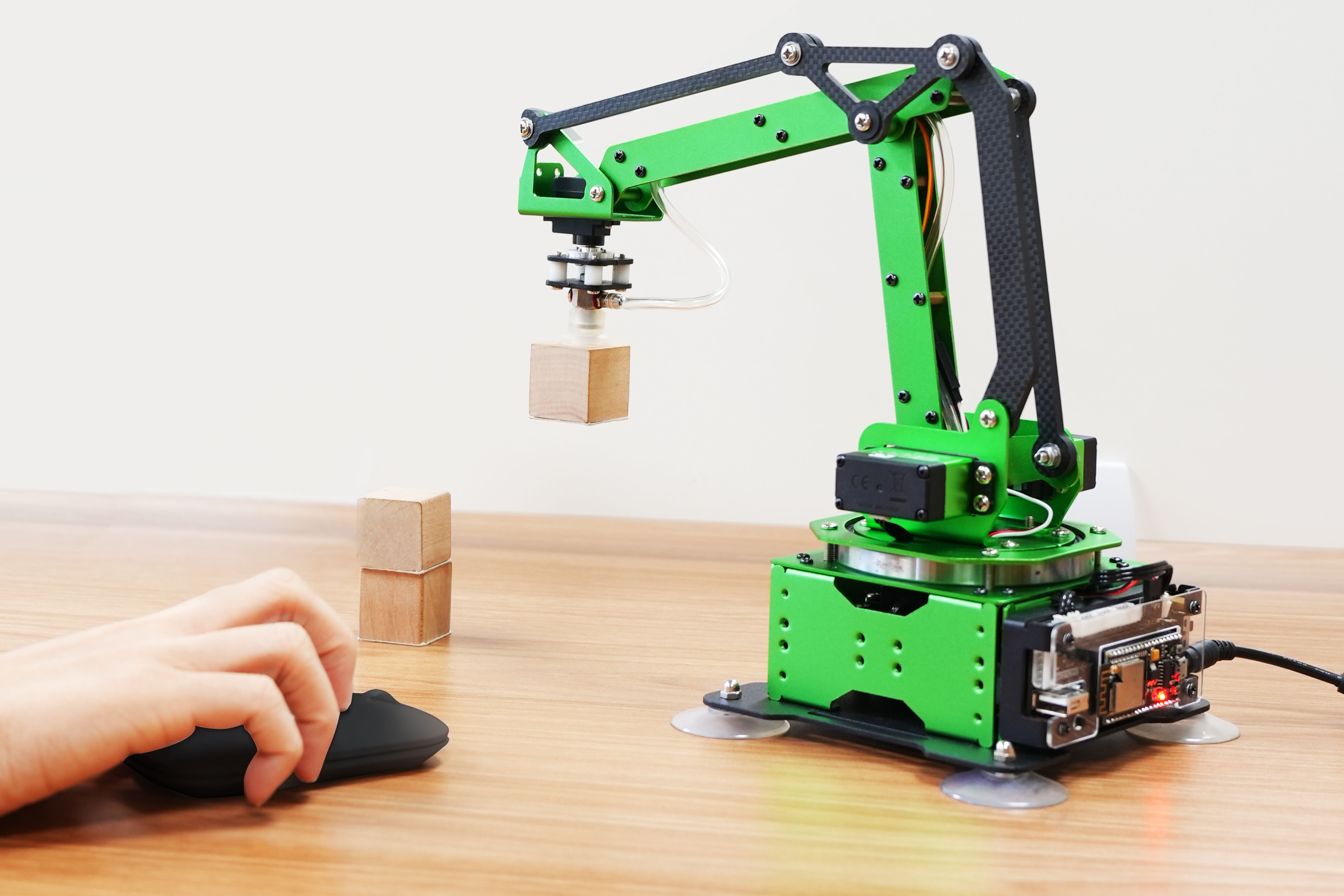
支持Python编程和Arduino编程
支持Python编程和Arduino编程

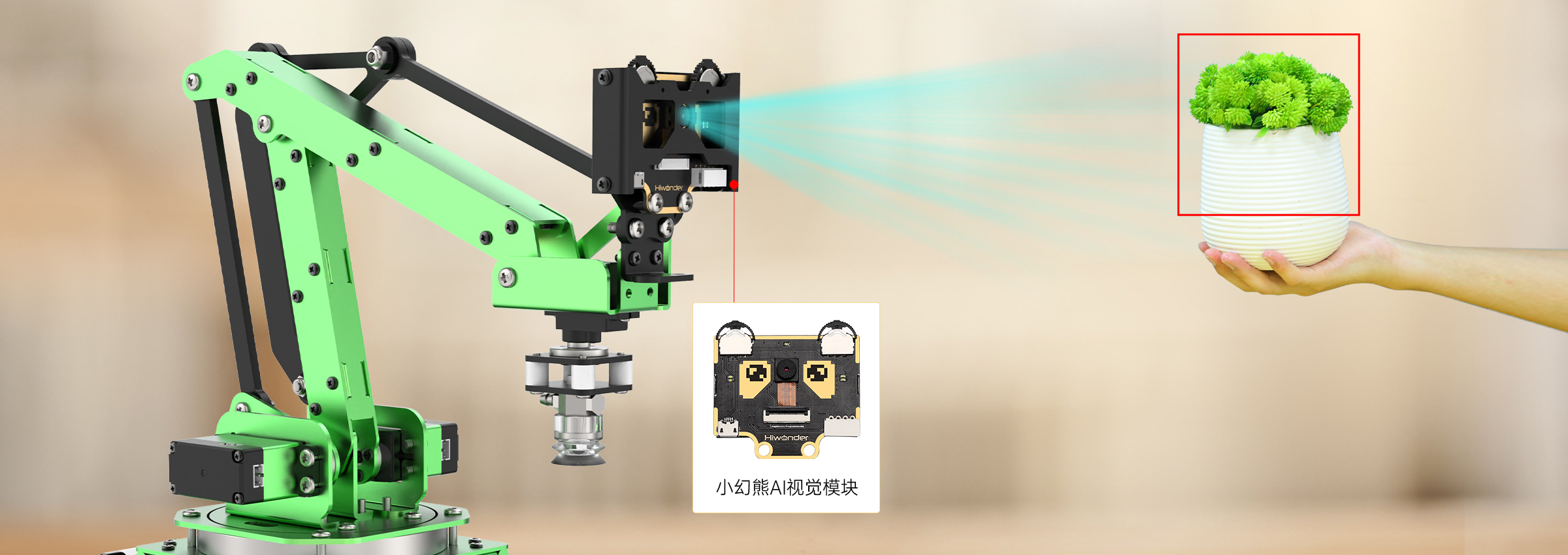
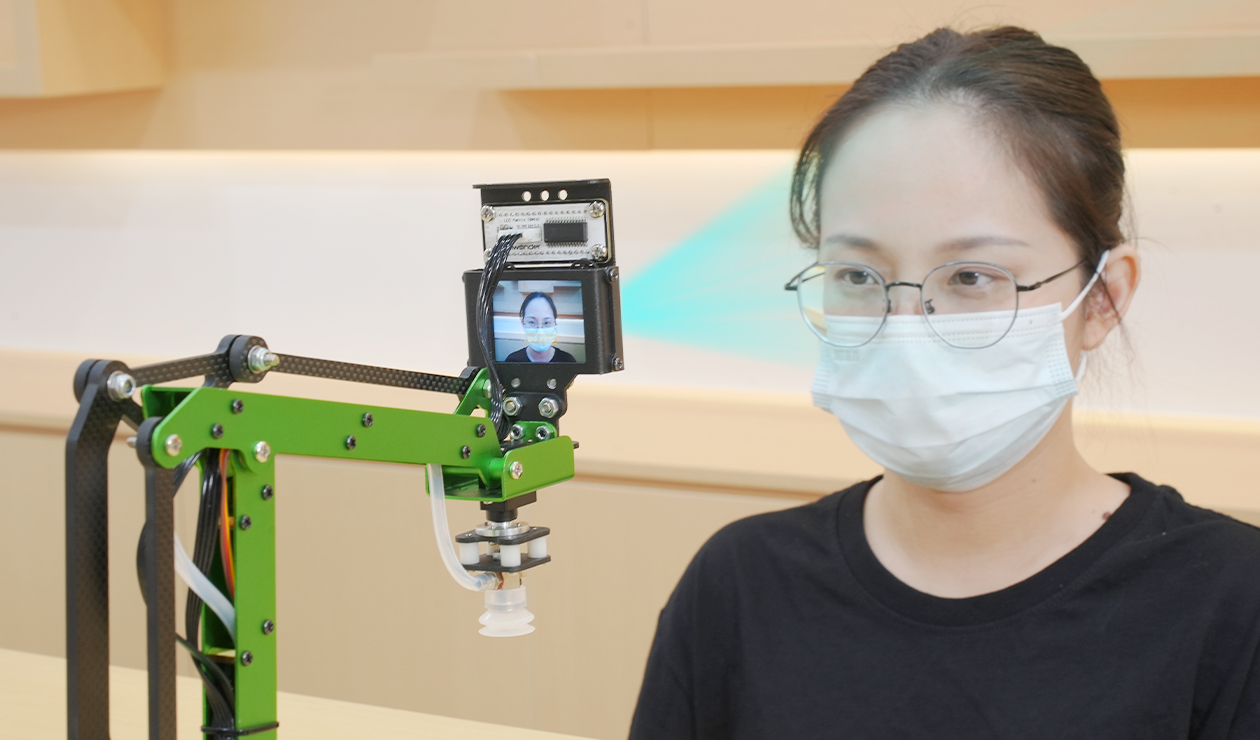
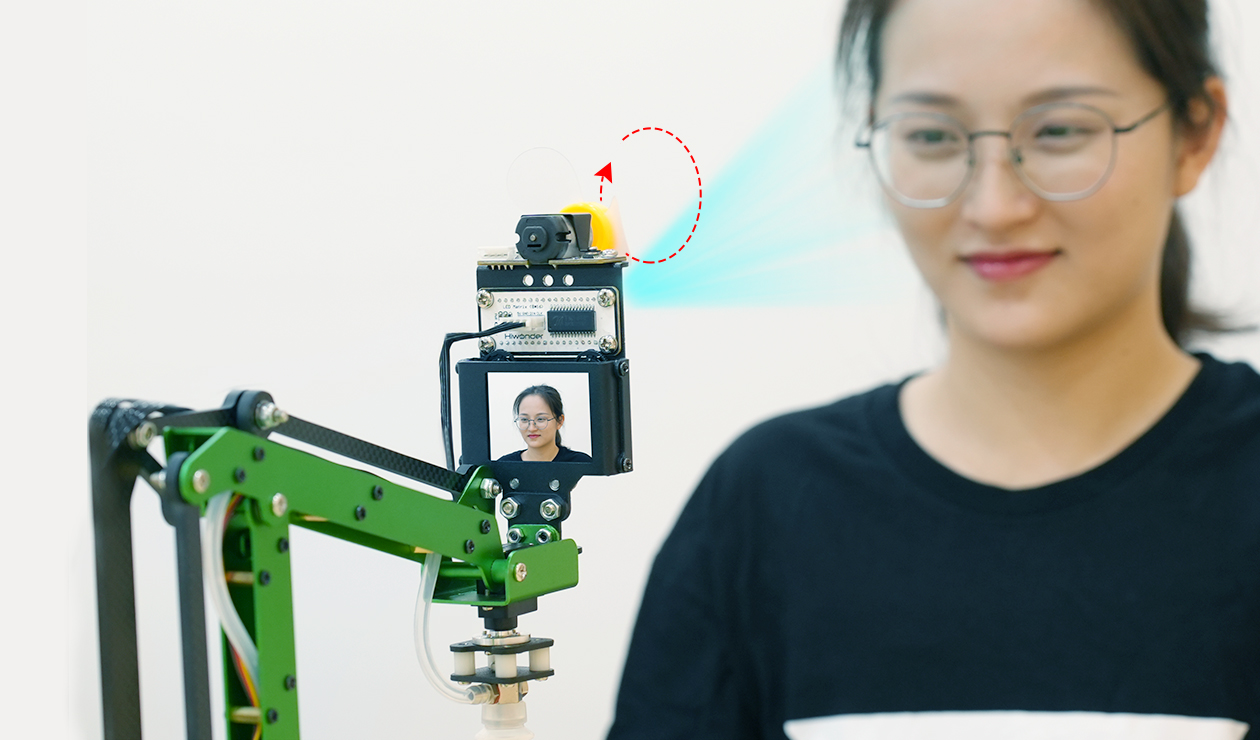
支持AI视觉模块拓展
MaxArm机械臂可以搭载小幻熊Al视觉模块,无需复杂训练,通过一键学习,即可实现颜色、人脸、标签、口罩识别与追踪等功能。配合风扇、点阵等其他电子模块,可以完成AI风扇、口罩识别、色块追踪、垃圾分类等有趣的项目。






-

新超声波模块
-

颜色传感器
-

触摸传感器
-

声音传感器
-

光线传感器
-

数码管模块
-

红外传感器
-
超声波码垛
-
触摸摆放
-
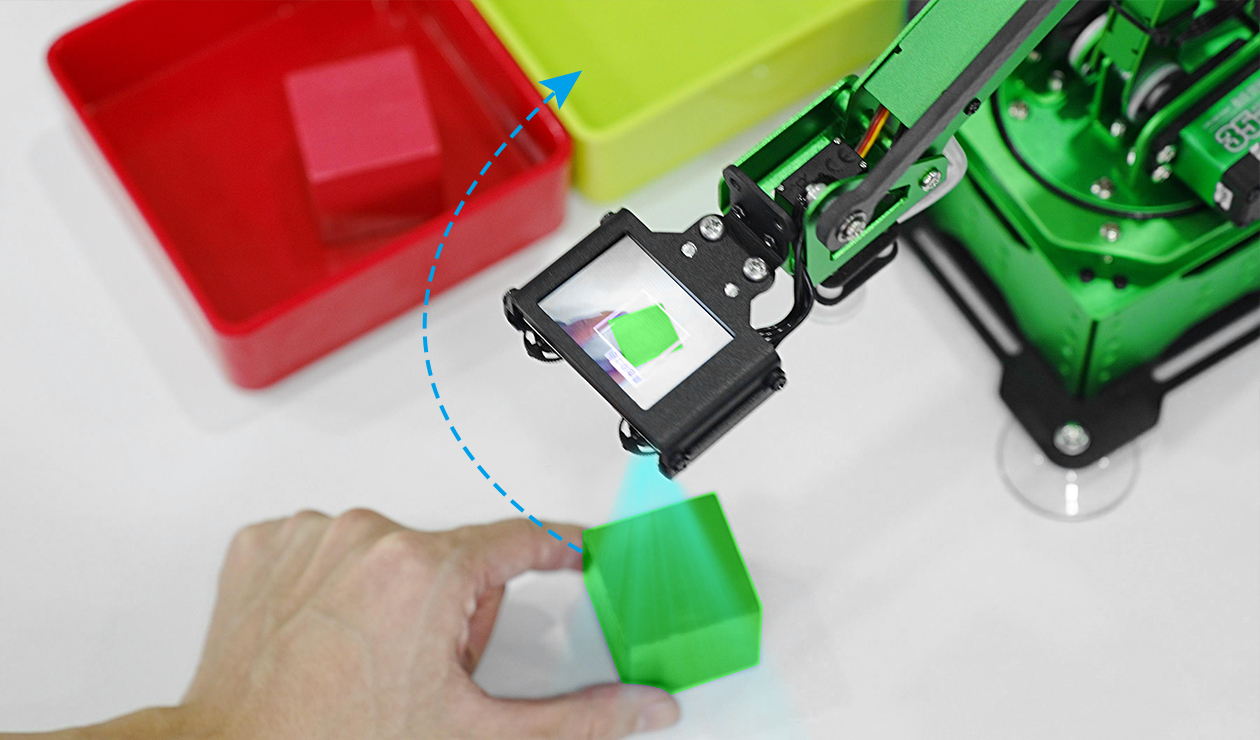
颜色分拣
-
智能声控
-
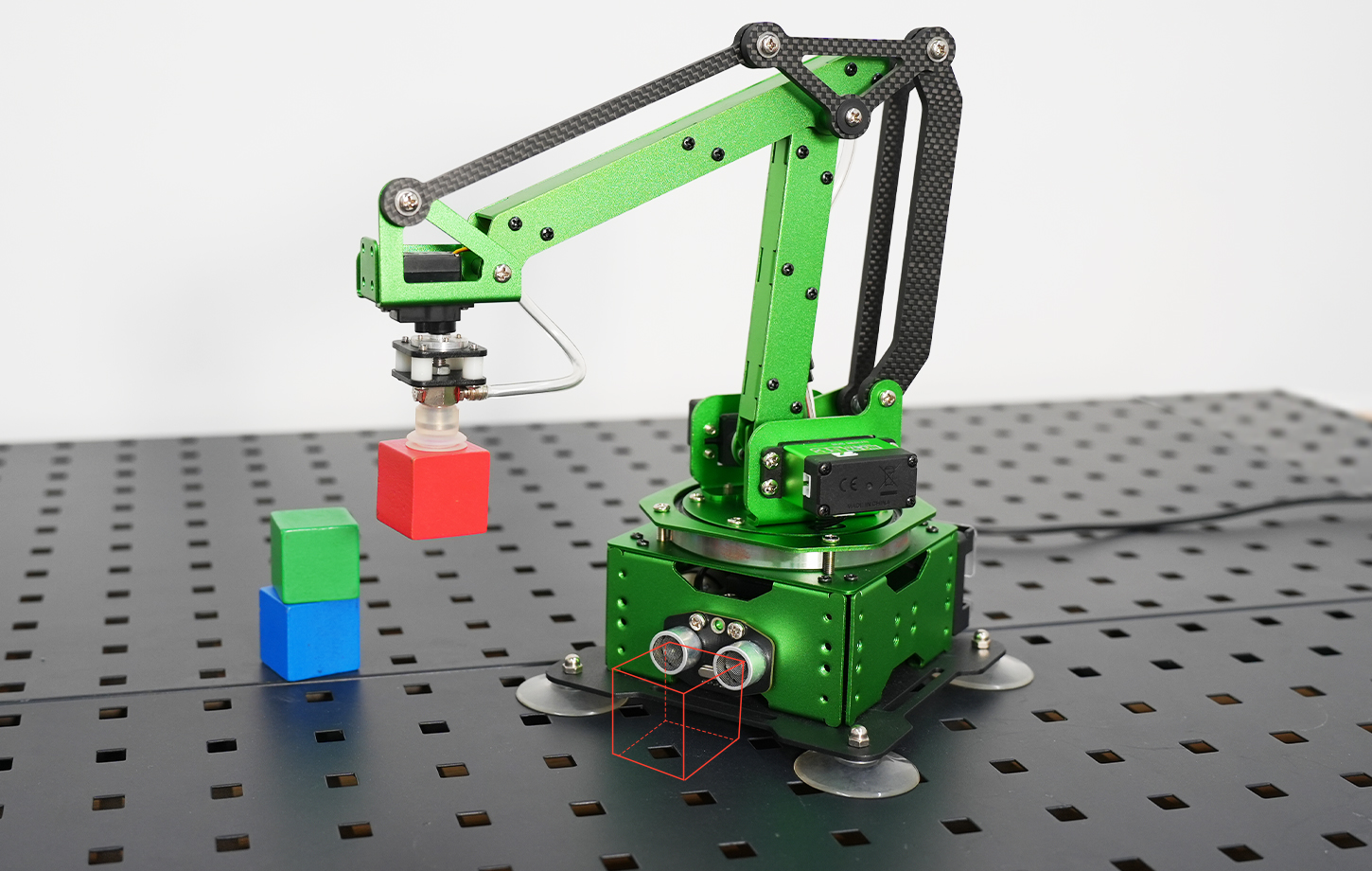
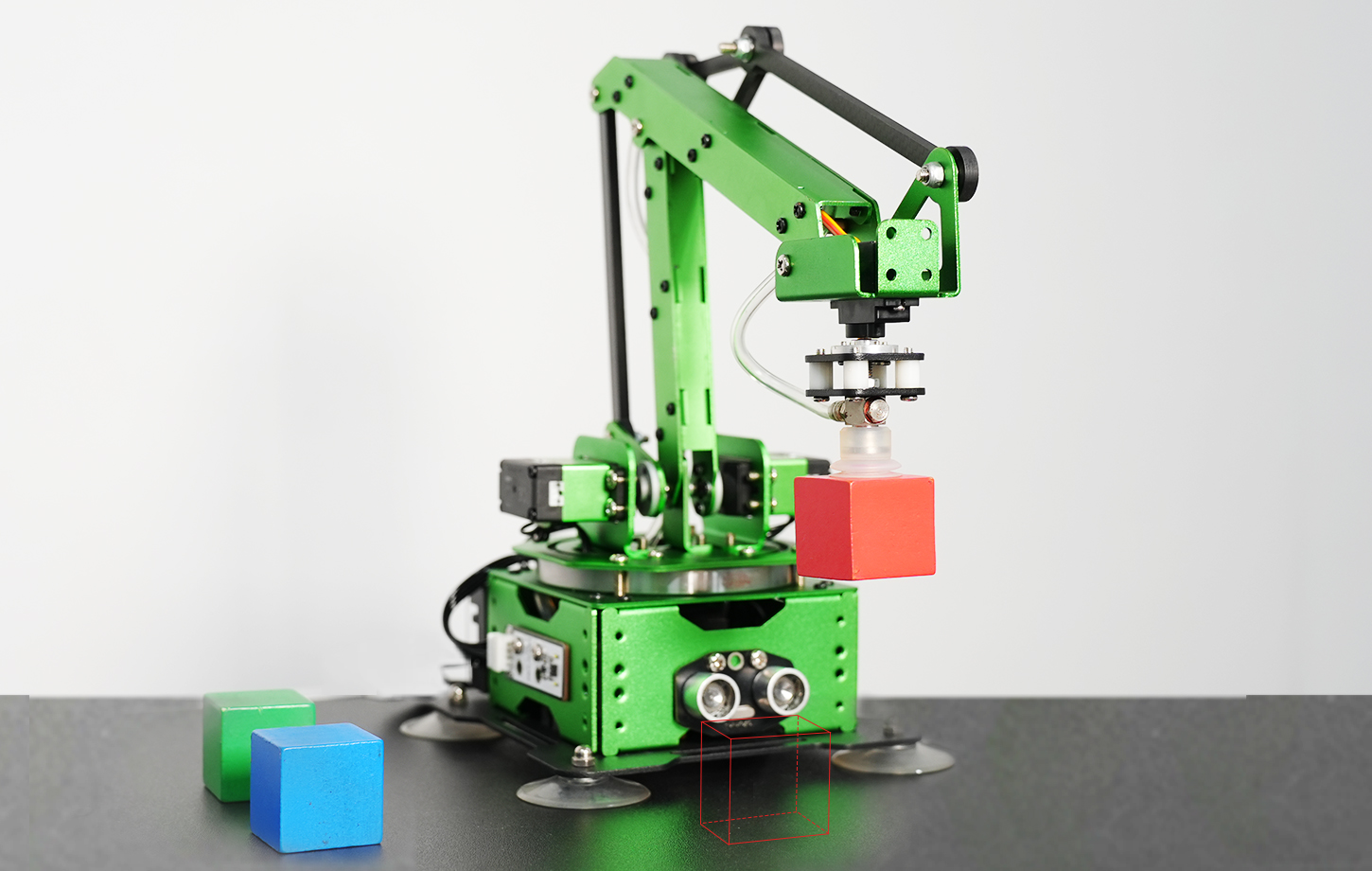
MaxArm可以通过超声波传感器检测木块,实现智能码垛。
-
通过触摸传感器,与MaxArm进行人机交互,实现触摸摆放木块。
-
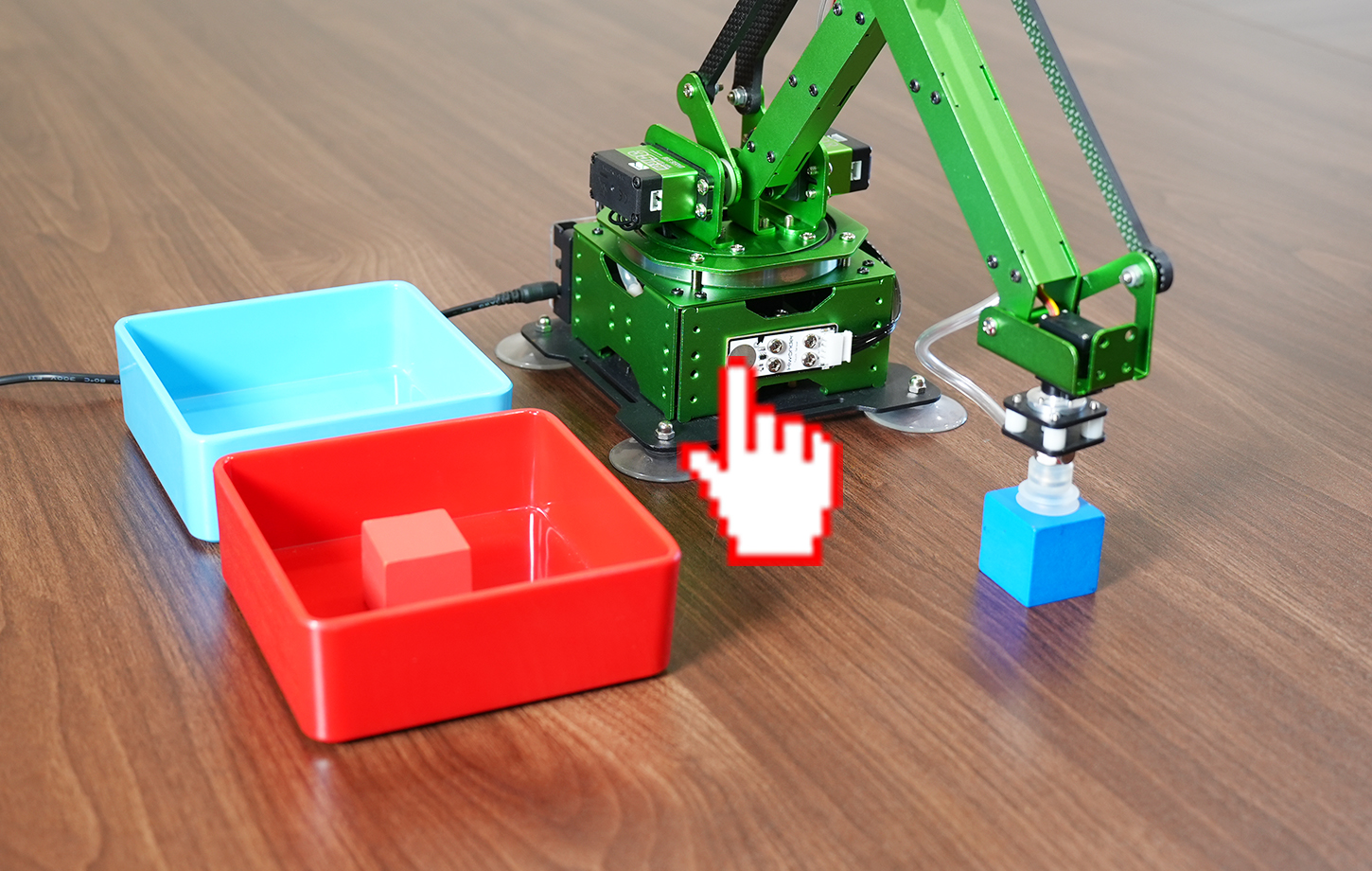
MaxArm可以通过颜色传感器识别木块颜色,实现颜色分拣。
-
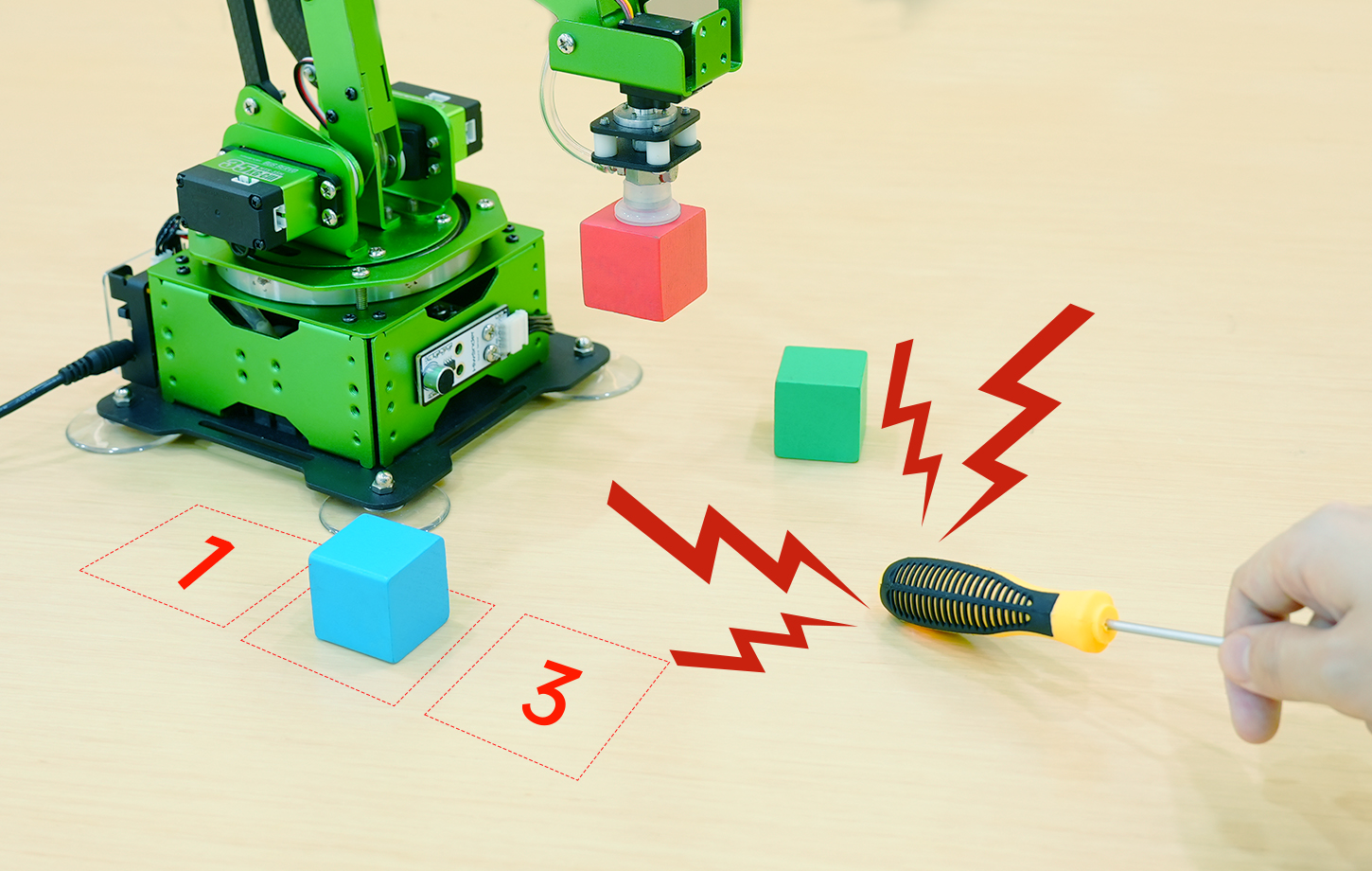
通过声音传感器识别敲击次数,将木块把放在对应的位置上。
支持拓展滑轨形态

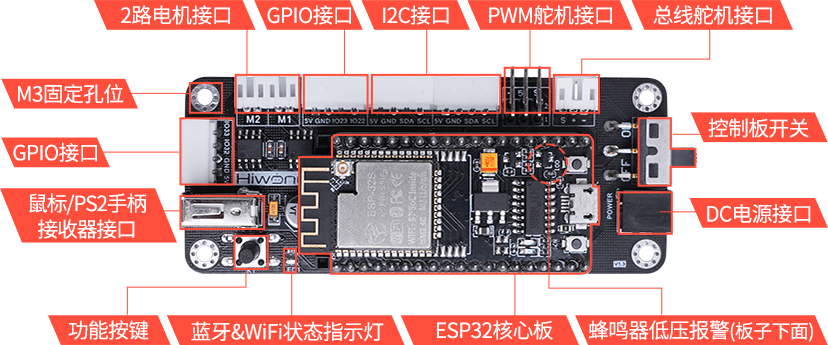
ESP32开源控制器






教程详细,开放源码
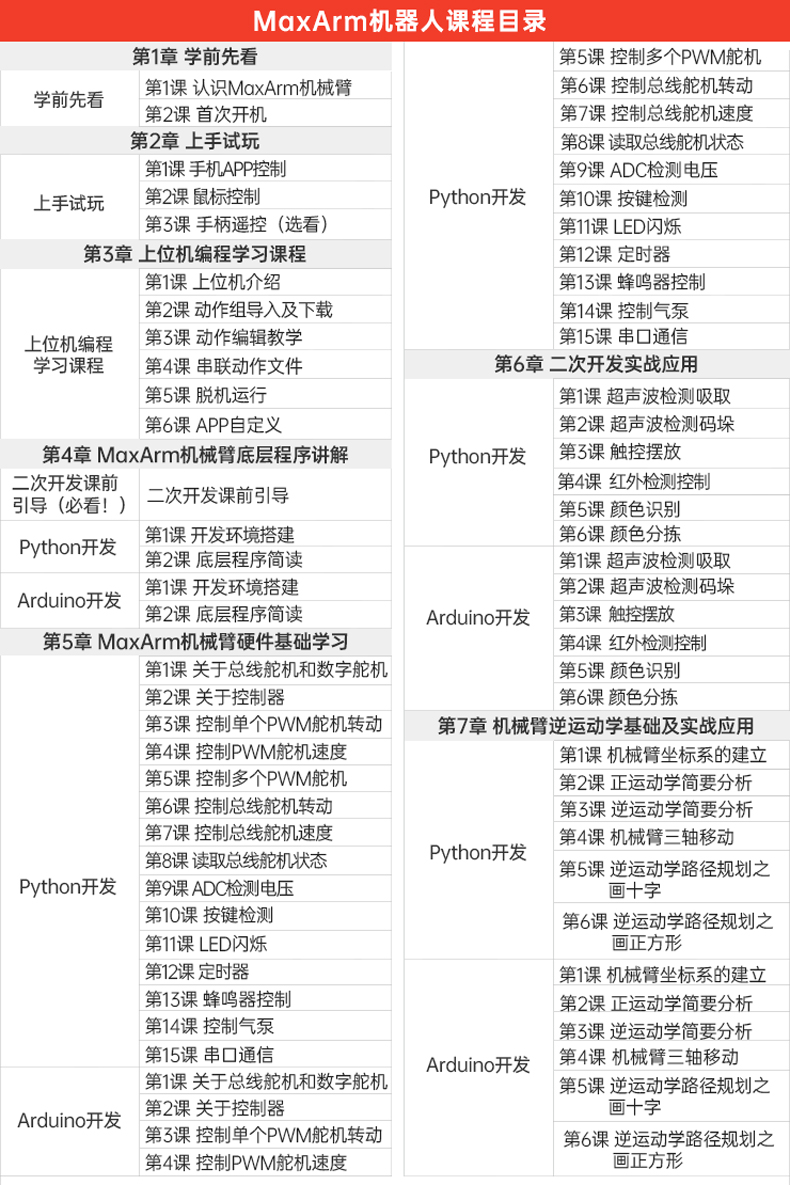
教程详细
配备精心研发的真人视频课程和丰富的学习资料,内容由浅入深,带您轻松学习。
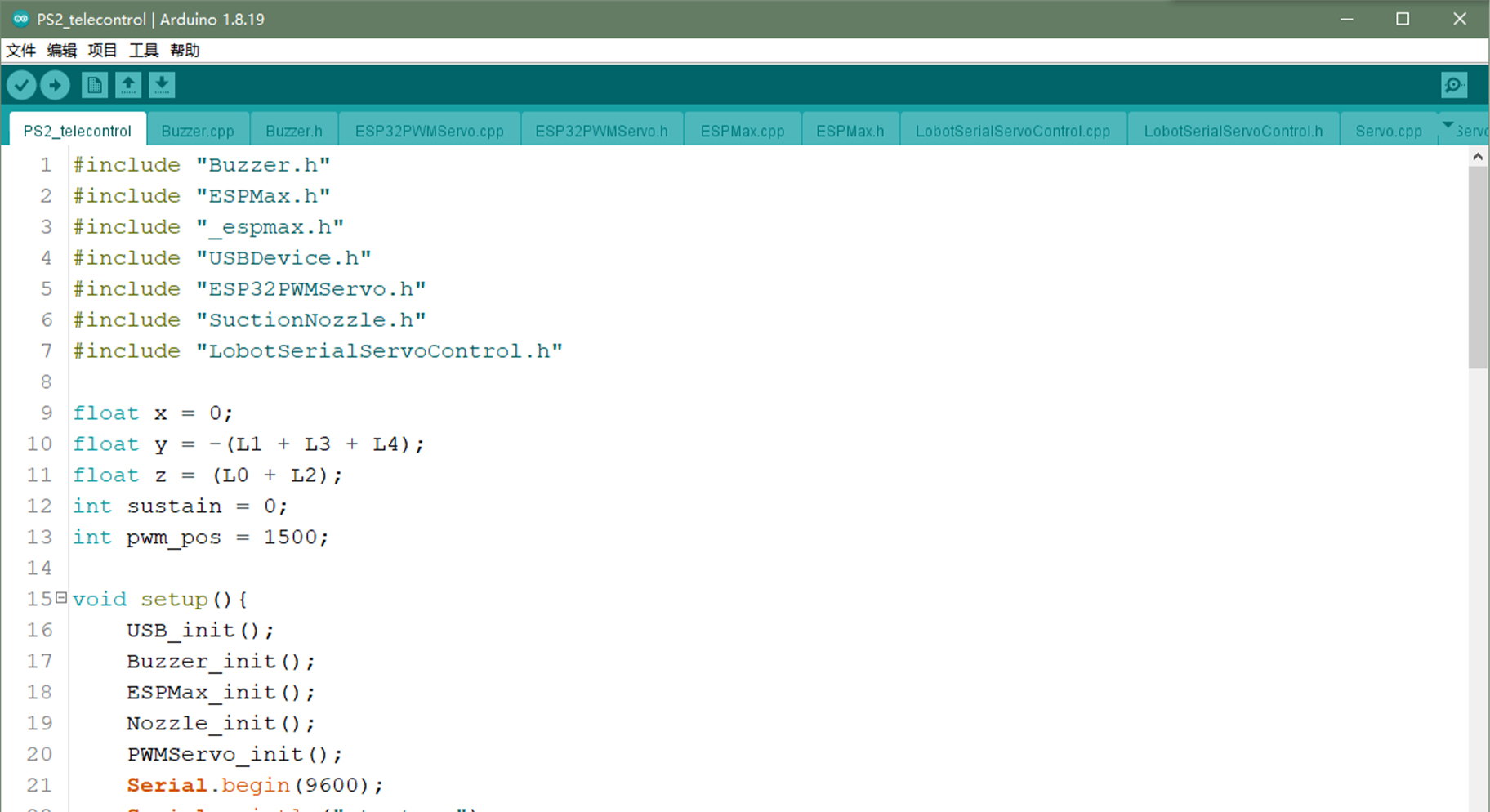
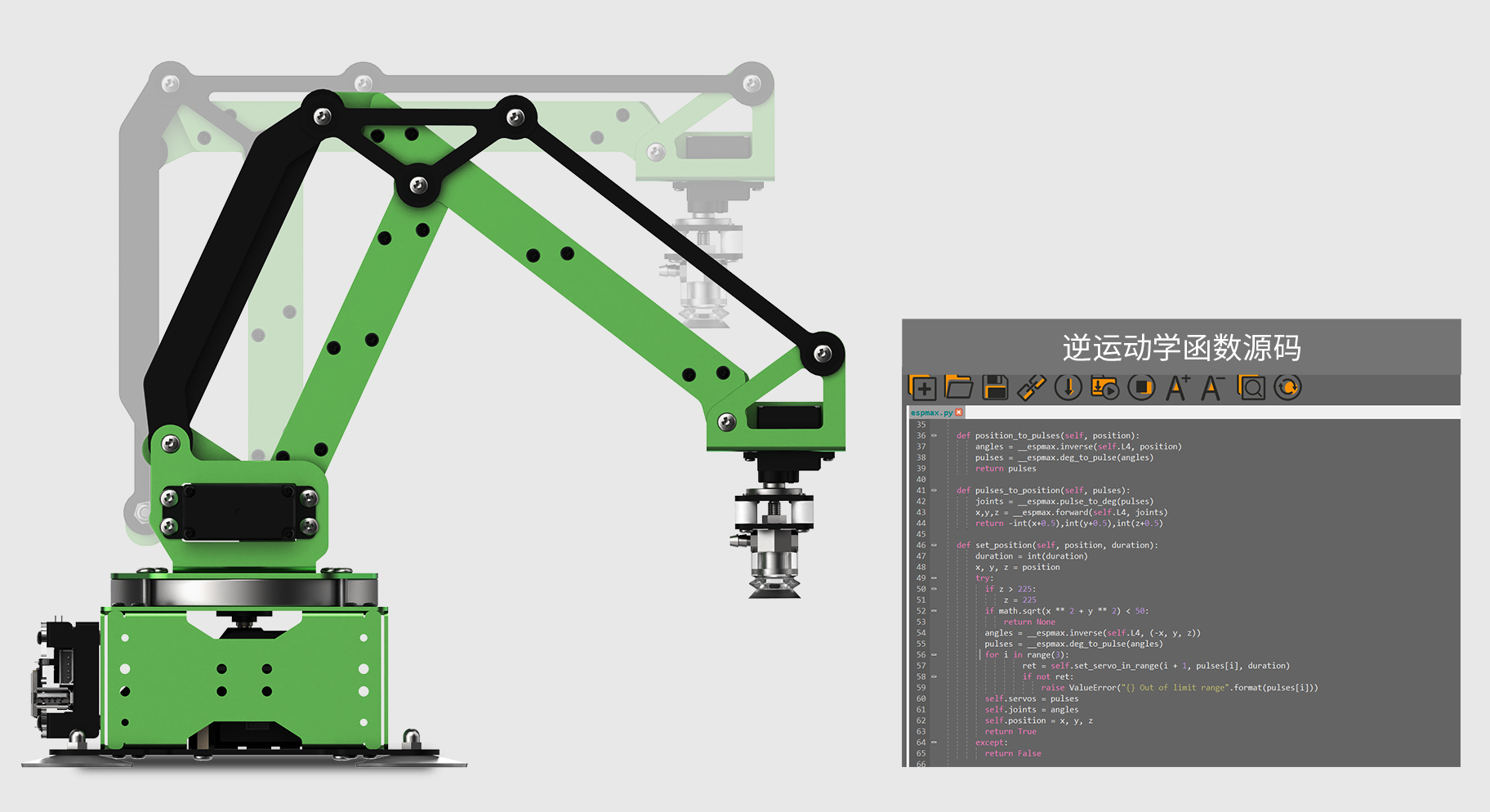
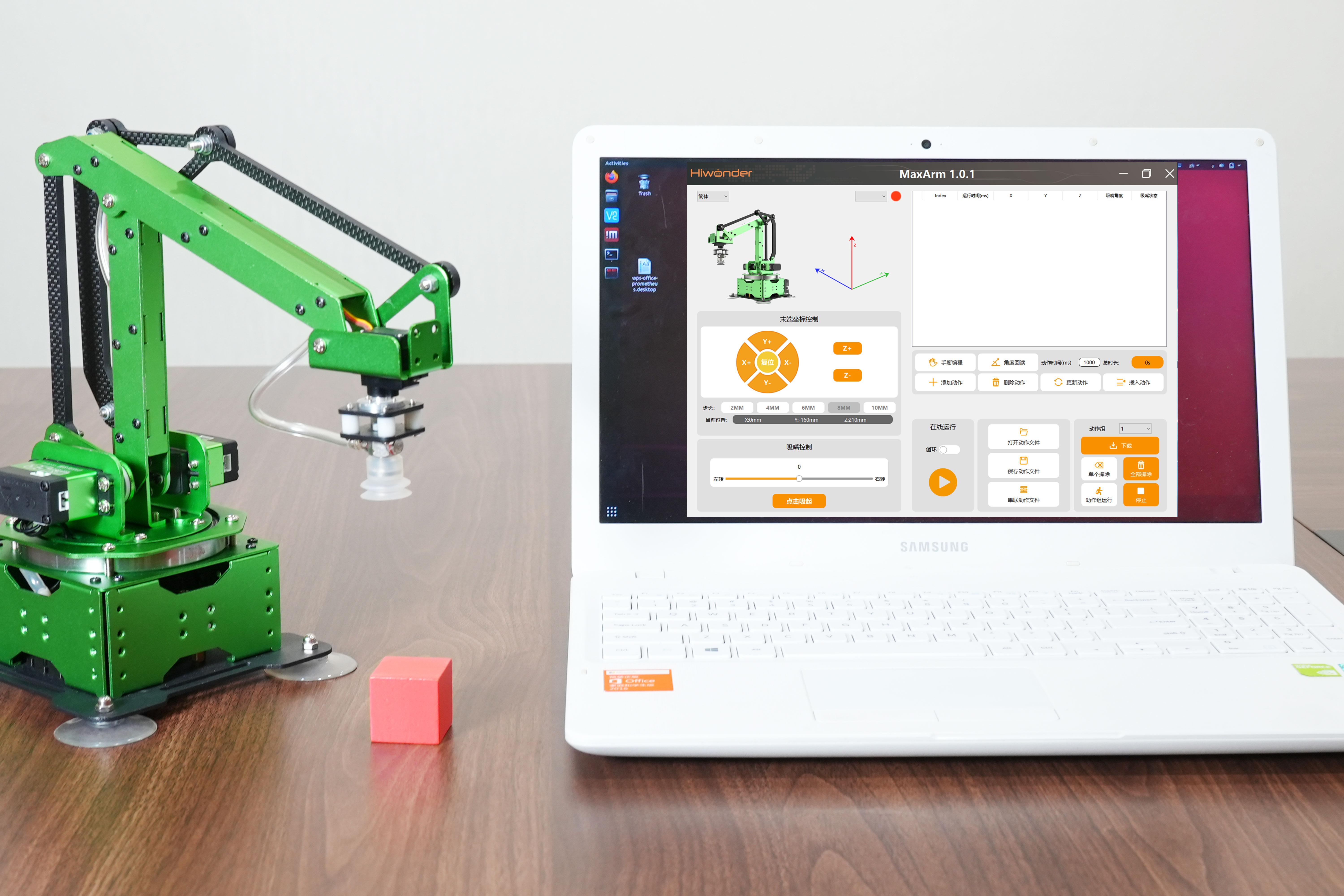
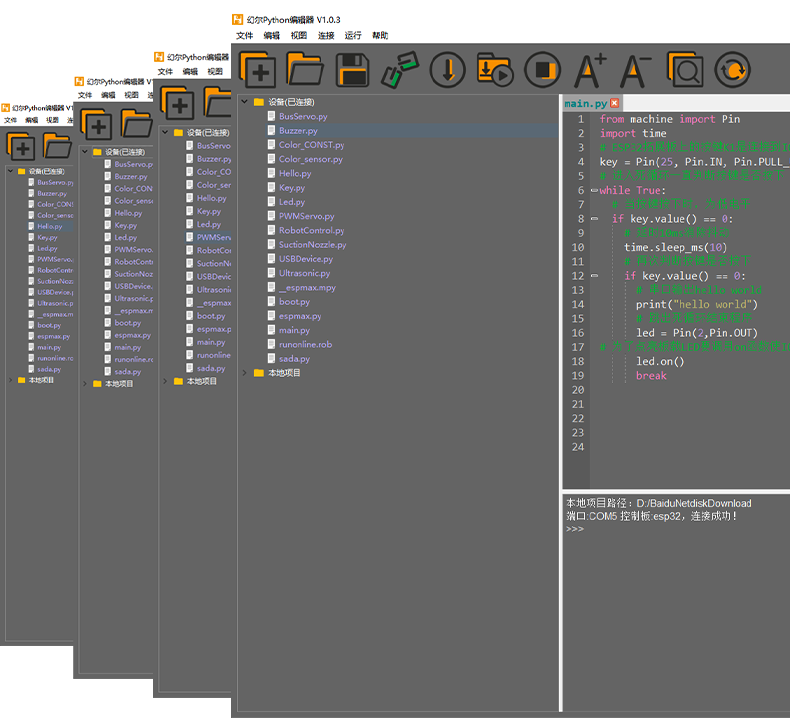
开放Python源码
我们为您提供Python的源代码,并对代码做了详细注释,方便您去学习。
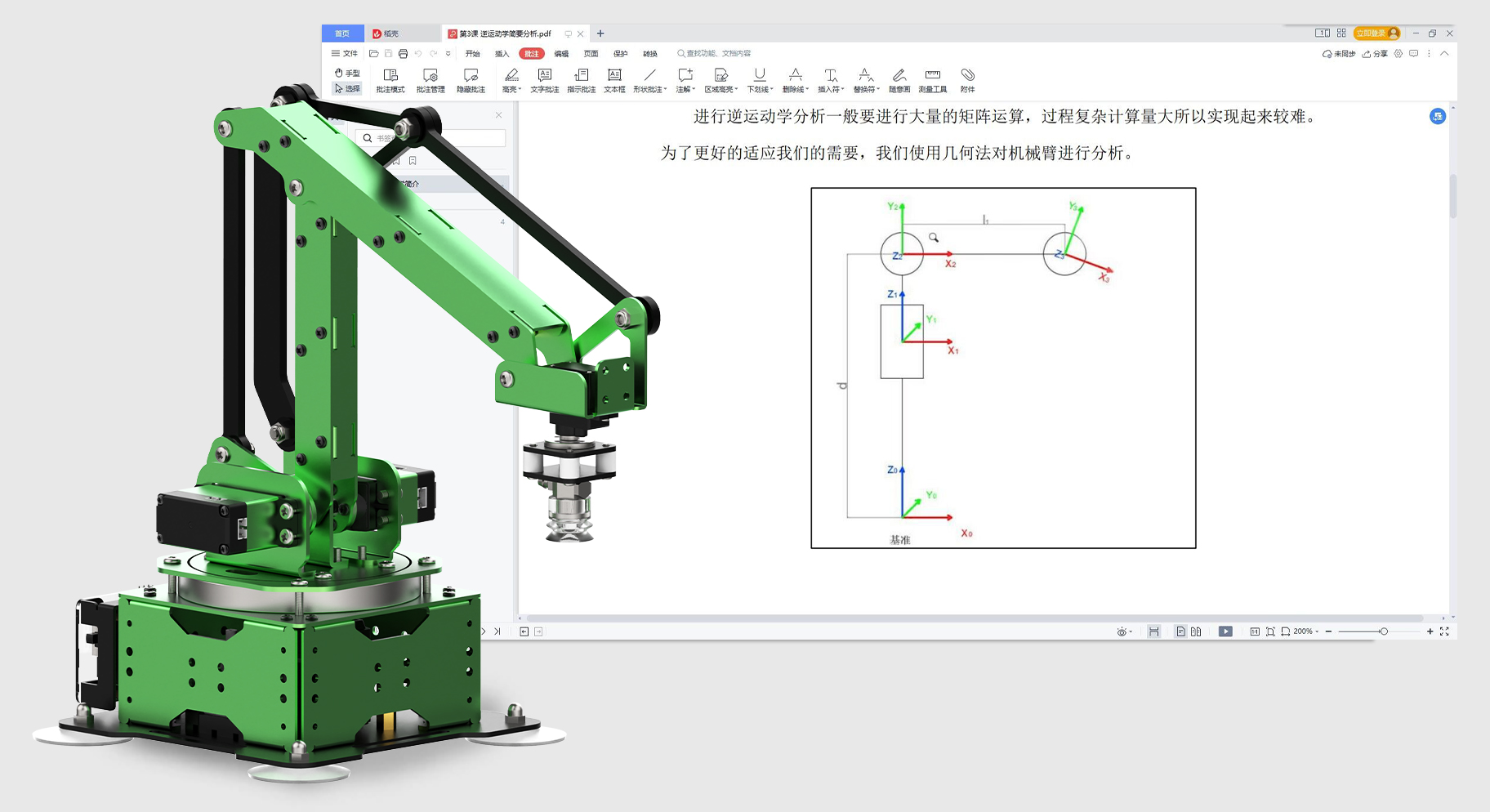
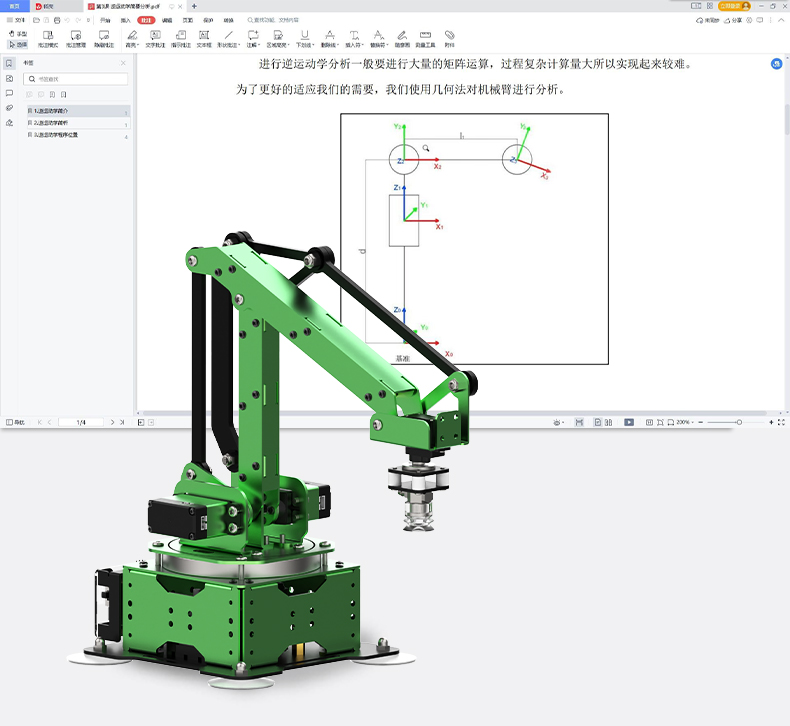
提供连杆坐标系图
基于ESP32开发平台,提供机械臂DH模型,深入理解机械臂原理。
提供众多配件
彩色方块

传感器拓展包

参数详情
| 产品尺寸 | 长158*宽160*高260(mm) |
| 产品重量 |
1.3kg |
| 机体材料 | 金属和玻纤板 |
| 机械臂自由度 | 4+1 |
| 电源 | 12V 5A DC适配器 |
| 主控系统 | ESP32开源控制器 |
| 软件 | 电脑上位机和iOS/安卓手机APP |
| 通信方式 | Wi-Fi、蓝牙 |
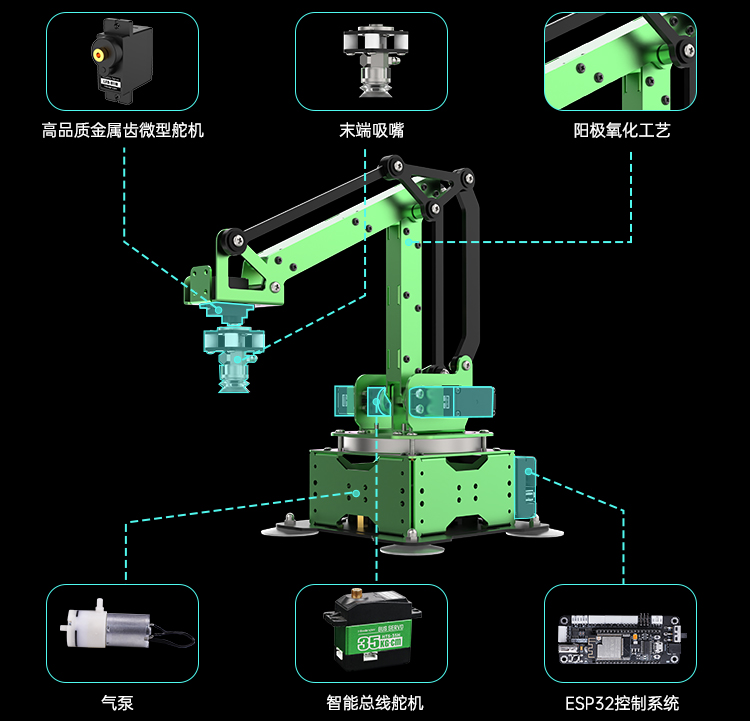
| 舵机型号 | HTS-35H智能总线舵机和LFD-01M微型舵机 |
| 控制方式 | PC控制/手机APP控制/无线手柄控制/鼠标控制 |
| 发货尺寸 | 长298*宽210*高175 (mm) |
| 整体重量(含包装) |
约2kg |
