

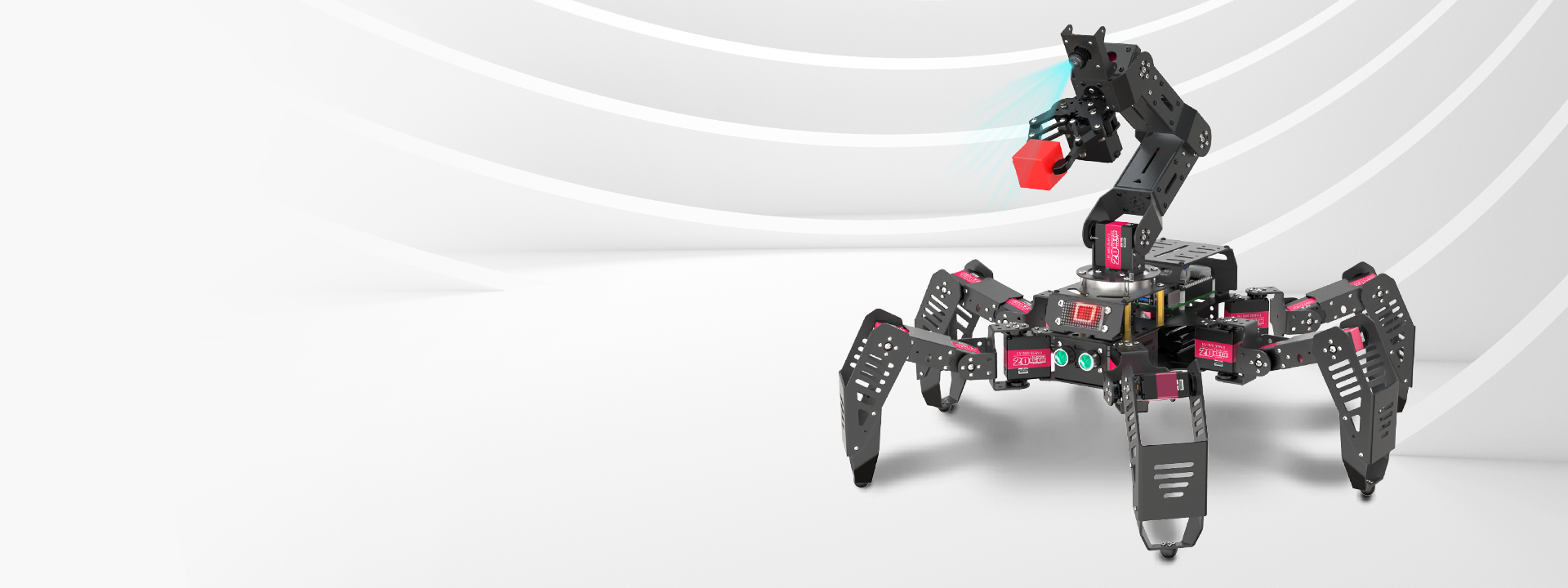

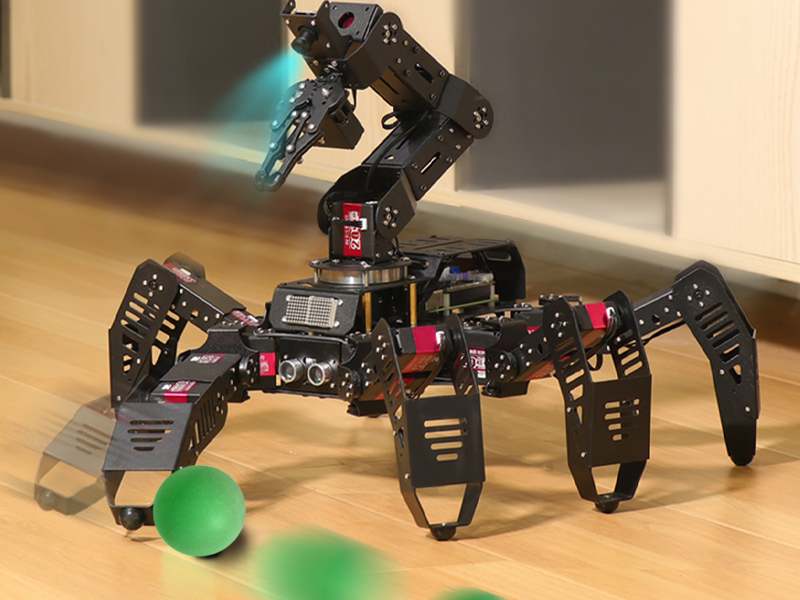
SpiderPi Pro
智能六足机器人
SpiderPi Pro
智能六足机器人
AI视觉/手眼合一/追踪抓取
SpiderPi
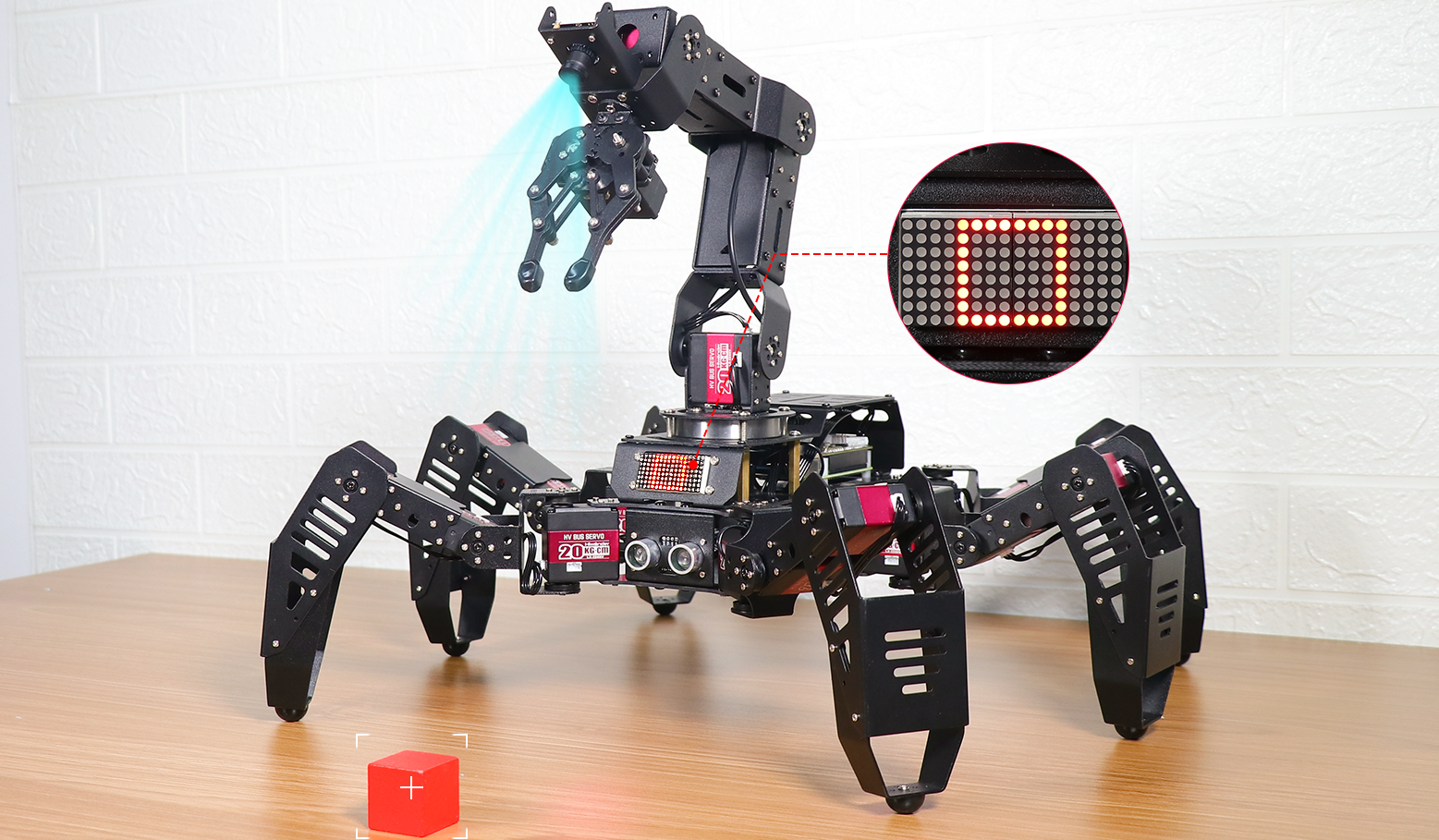
Pro是一款基于树莓派4B开发的AI视觉六足机器人套件,它在六足机器人的基础上,增加了一个视觉机械手臂,可以拓展出更多有趣的AI创意玩法,如物品识别抓取、运输搬运、智能分拣,多台群控等。
它不仅能满足用户对机器视觉、六足步态和机械臂运动学的学习和验证,还为传感器应用、视觉抓取等二次开发提供快速、便捷的集成方案。
-
抓取分拣
-
多台群控
-
目标追踪
-
人机交互

原创造型,专利设计
SpiderPi Pro融合了六足机器人和多关节机械臂的优势,极具想象空间和观赏性。六足机器人可以攀爬越障,可以调整自身躯干的角度和高度,适应全地形行走,相比于普通的轮式底盘,有着更强的越野性能和路面通过性能。多关节机械臂赋予了六足机器人强大的执行能力,使得SpiderPi Pro可以在三维空间里对目标物品进行轻松抓取。


手眼合一,眼随手动,智能分拣
幻尔SpiderPi Pro将摄像头装在机械臂末端,不仅使得机械臂有着第一视觉,还使得摄像头运动范围更广,让机器人拥有更多的功能。
-

FPV第一视觉,高清图传,实时遥控
-
视觉定位,智能分拣
-

逆运动学算法,追踪夹取更精准
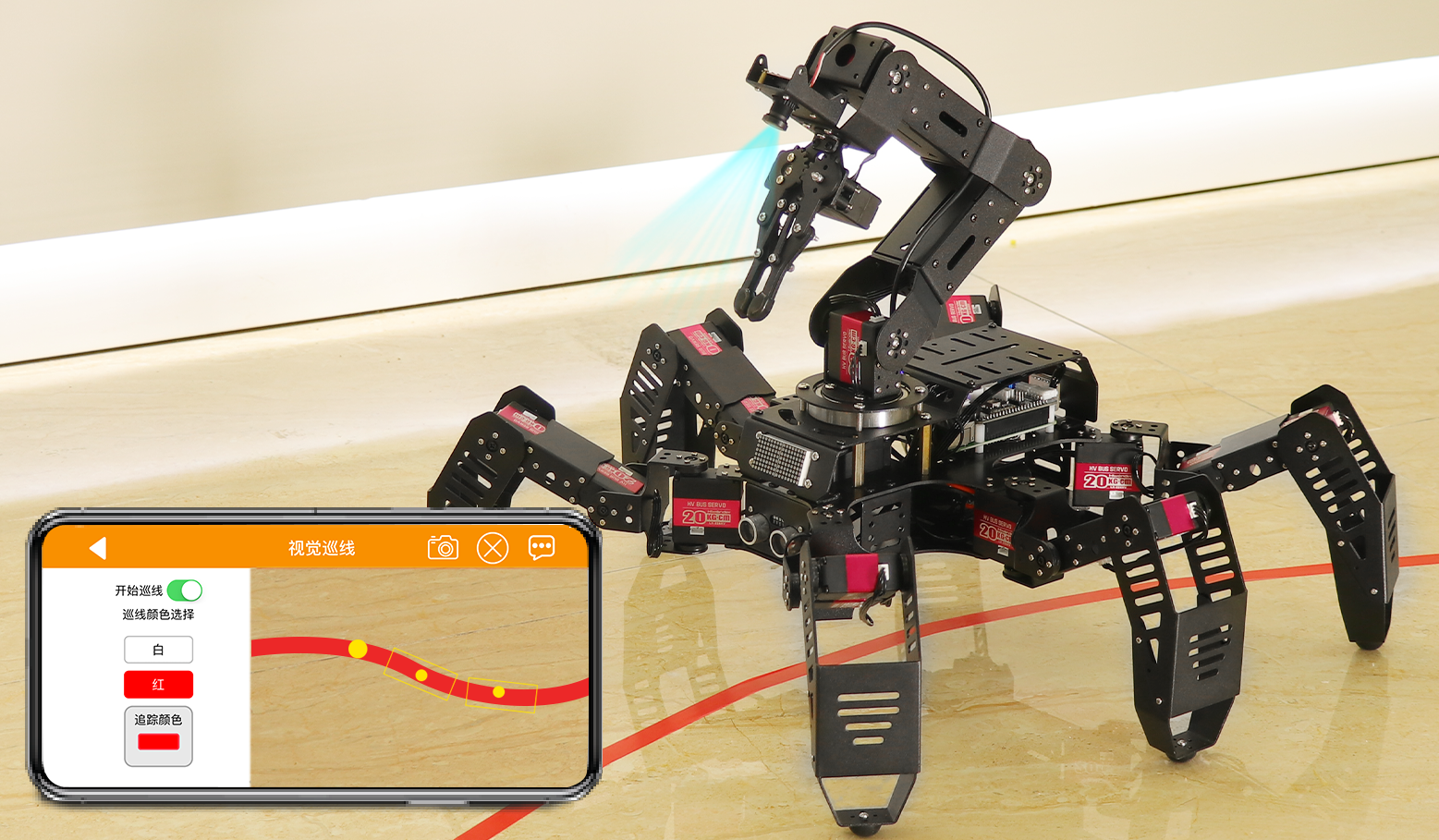
AI视觉识别,目标追踪
SpiderPi Pro以OpenCV为图像处理库,利用第一视觉,识别并定位目标色块,从而实现视觉巡线、目标追踪、标签识别、智能踢球、形状识别、人脸检测等功能。
-
视觉巡线
-
目标追踪
-
标签识别
-
形状识别



目标追踪,智能踢球
幻尔SpiderPi Pro机器人不仅可以对目标物品进行追踪,还可以计算出和机身的相对位置,通过逆运算学算法,进行步态自主切换,可以实现智能踢球、踢方块等有趣的创意玩法。
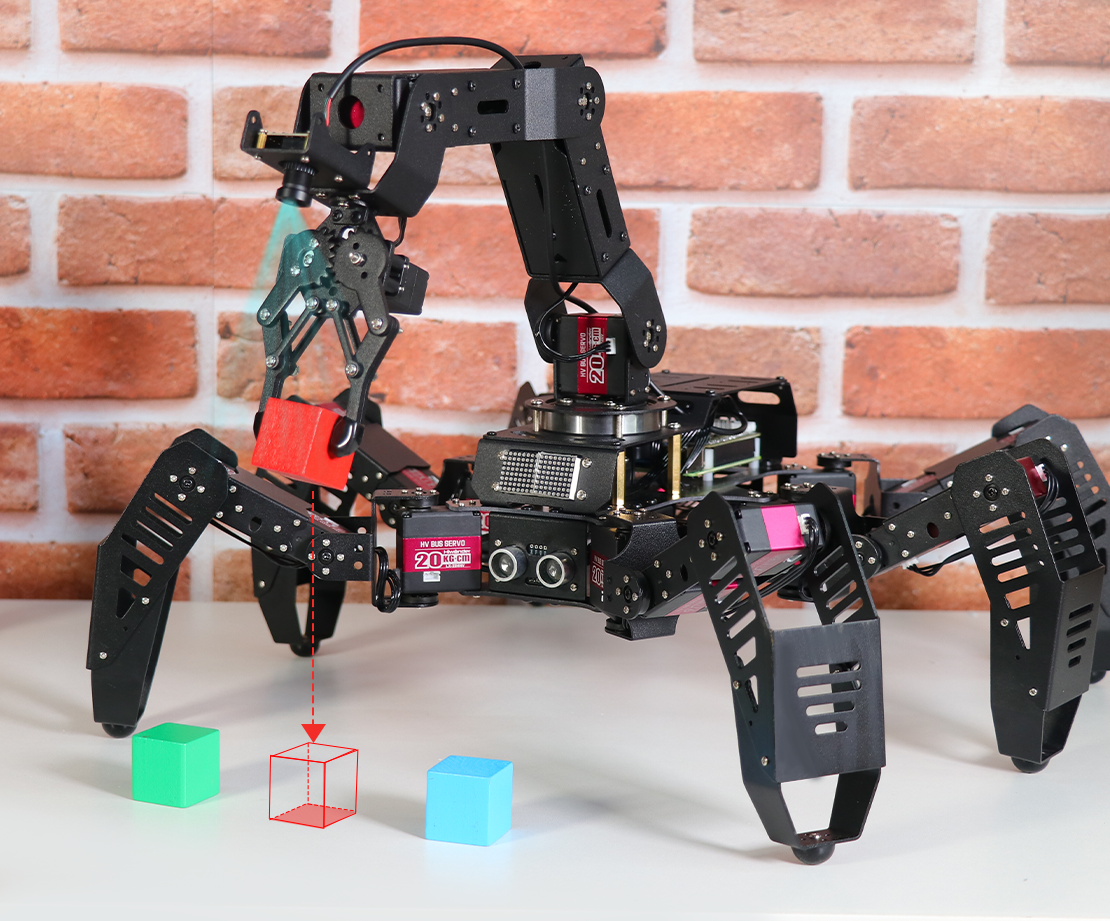
搬运分拣,无限创意
SpiderPi Pro六足机器人可以识别出不同色块的位置,判断色块和机身的距离,通过逆运动学算法,机械臂可以对色块进行抓取搬运,全自主识别行进路线,最终放置到相应的区域。


动作组编辑软件
提供图形化上位机软件,拖动滑竿即可控制机器人舵机转动,无需代码, 即可编辑机器人动作组。
.png)
2种控制方式
SpiderPi Pro可以使用2种方式进行控制,支持安卓/iOS手机APP控制和手柄控制。

-
手机APP控制
-

手柄控制

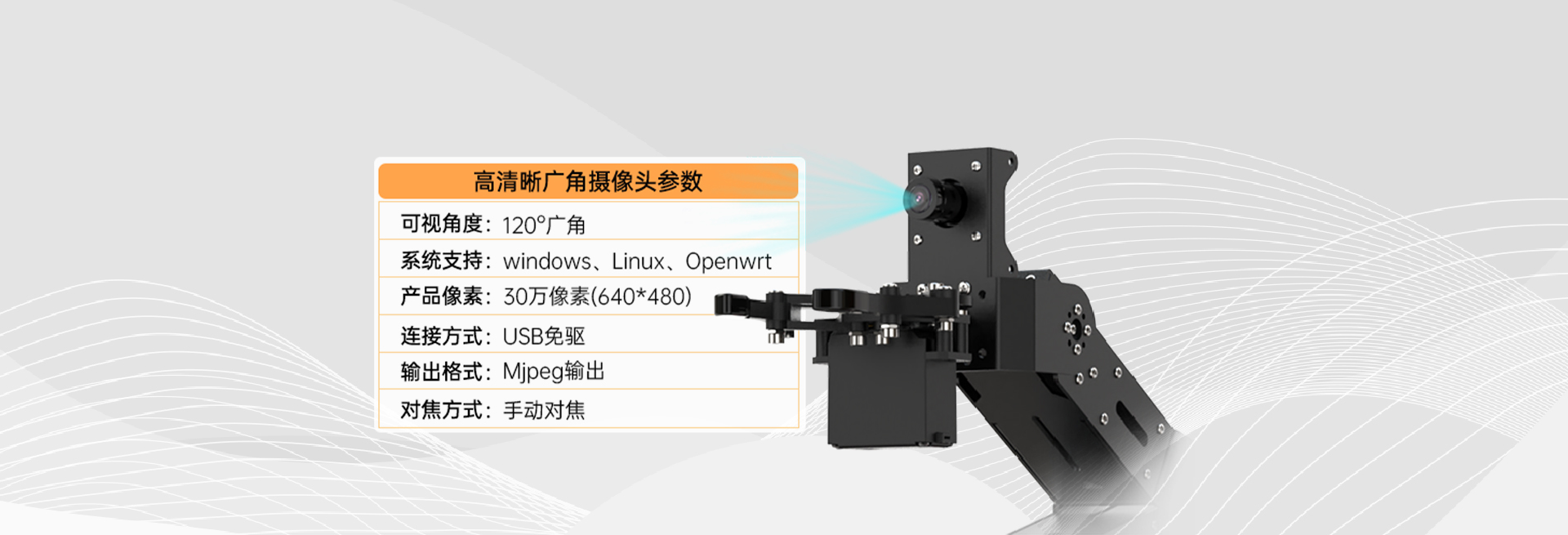
高清晰广角摄像头
SpiderPi Pro搭载全新120°广角高清晰度摄像头,机器人的视觉识别范围更大,摄像头支持手动调焦,使用更方便。
智能高压总线舵机,动力强劲
SpiderPi Pro搭载的机械臂采用智能高压总线舵机,精度高、带反馈,相比使用传统的7.4V舵机,机器人续航时间更长。强大的控制系统树莓派4B与树莓派扩展板强强联合,可以实现更多玩法!

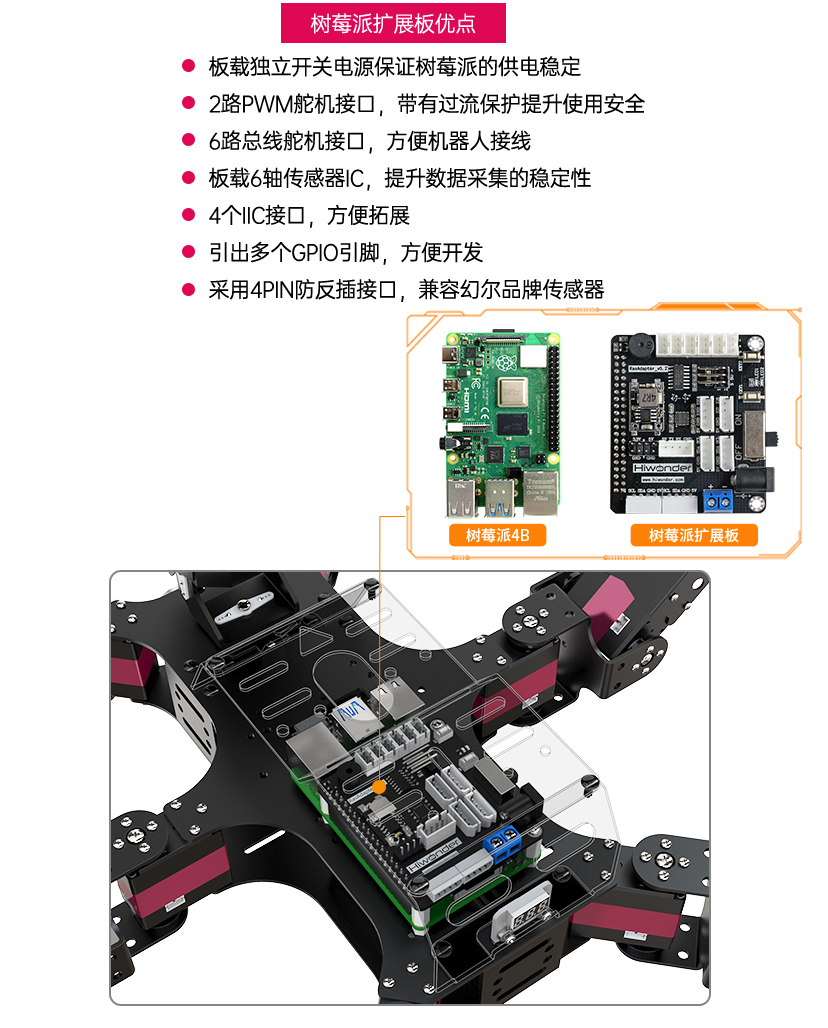
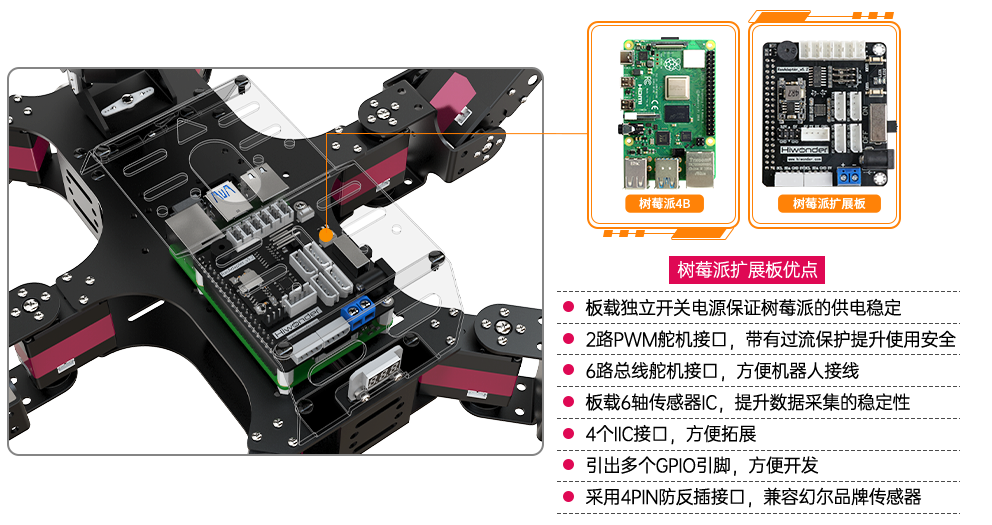
树莓派控制系统
树莓派4B与树莓派扩展板强强联合,可以实现更多玩法!
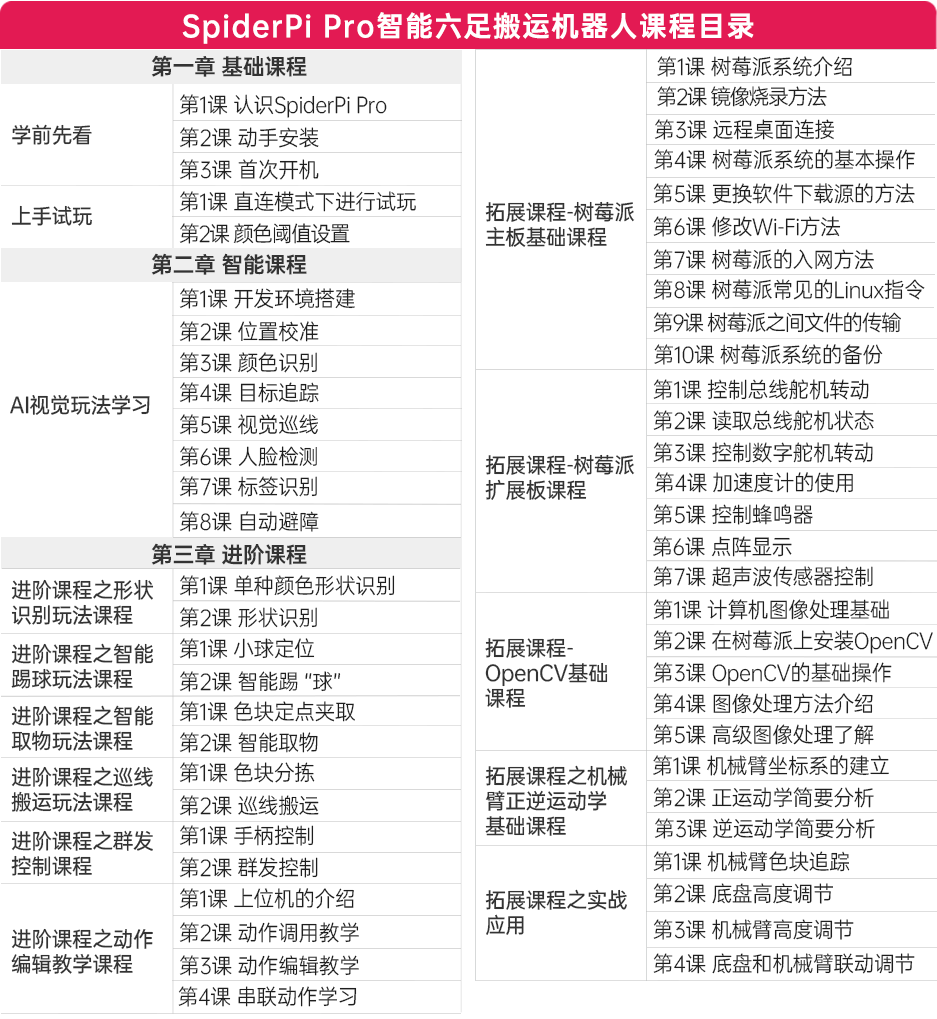
教程详细,开放源码
教程详细
配备精心研发的真人视频课程和丰富的学习资料,内容由浅入深,带您轻松学习。
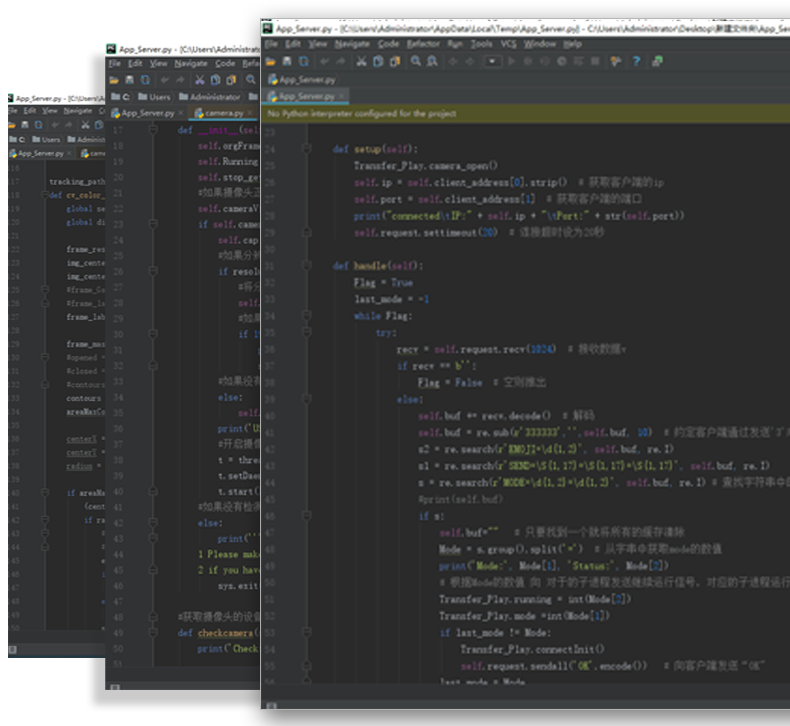
开放Python源码
我们为您提供Python的源代码,并对代码做了详细注释,方便您去学习。
教程详细
配备精心研发的真人视频课程和丰富的学习资料,内容由浅入深,带您轻松学习。
开放Python源码
我们为您提供Python的源代码,并对代码做了详细注释,方便您去学习。
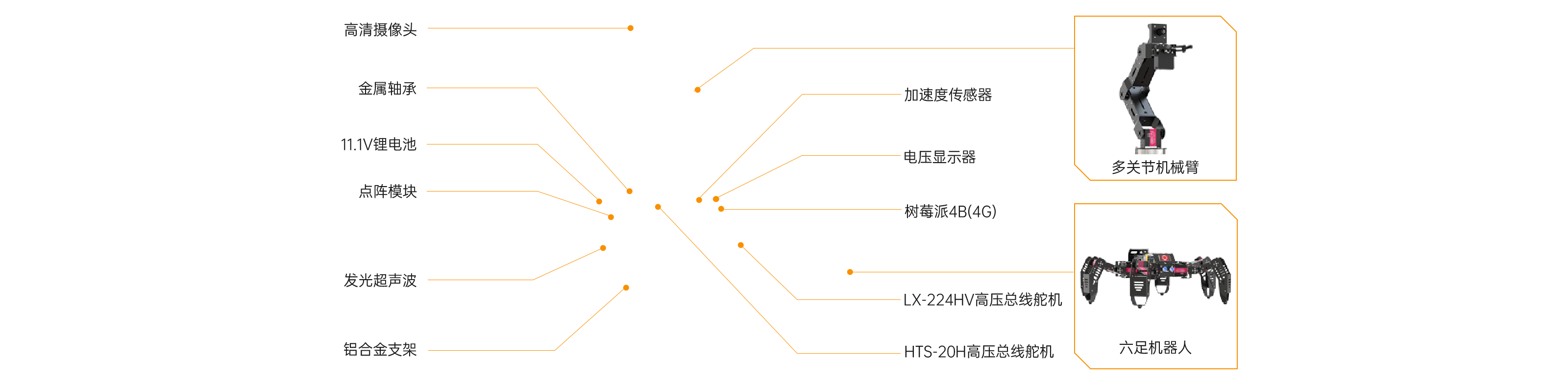
提供众多功能拓展配件


参数详情
| 机体材料 | 采用金属和玻璃纤维板混合而成 |
| 摄像头分辨率 | 480P |
| 超声波测距 | 2~400cm |
| 机械臂自由度 | 4+1 |
| 电池 | 11.1V 3500mAh 5C锂电池 |
| 续航时间 | 持续运行约40min |
| 自由度 | 18个DOF(腿部) |
| 控制系统 | 树莓派4B(4G内存)控制板和树莓派扩展板 |
| 配套软件 | 手机APP+PC端上位机 |
| 通信方式 | Wi-Fi、以太网 |
| 舵机参数 | LX-224HV 高压总线舵机/HTS-20H高压总线舵机 |
| 控制方式 | PC控制/手机APP控制/手柄控制 |
| 包装尺寸 | 长度*宽度*高度 400*400*170mm |
| 整体重量(含包装) | 约4.8kg |
