


观看视频
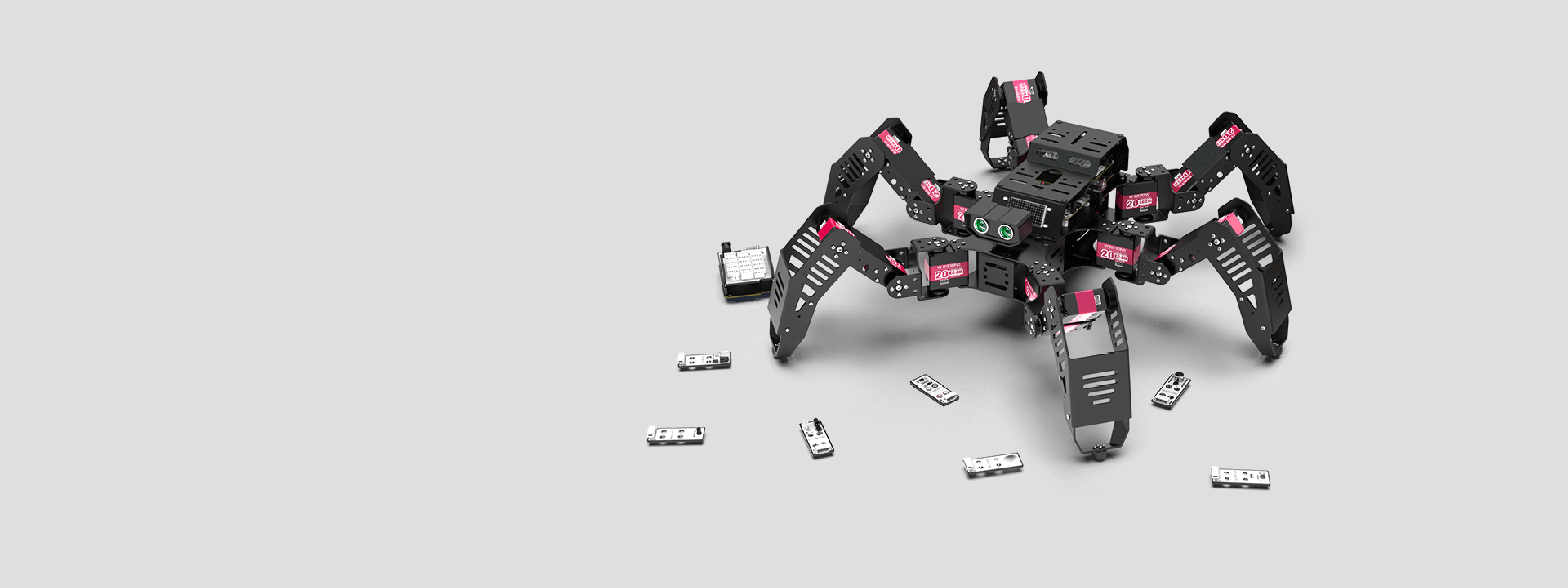
高度集成机身,动力十足
Spiderbot基于Arduino平台,机身搭载多种传感器,拥有18个高压智能总线舵机,动力十足,续航持久!
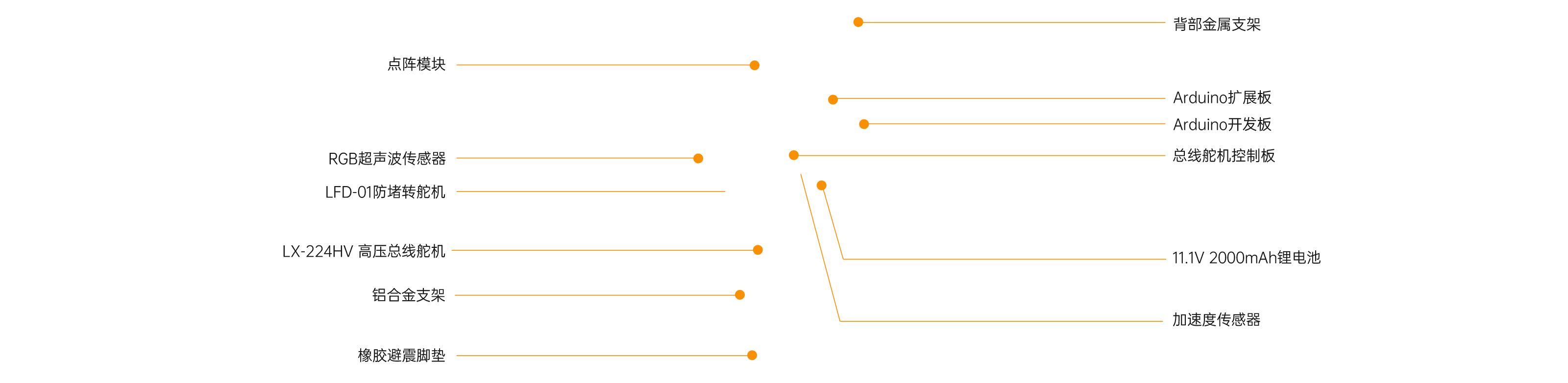
传感器丰富,支持语音交互
Spiderbot拥有发光超声波、点阵模块、加速度传感器等多个电子模块,搭配语音拓展包可实现智能语音交互。
-
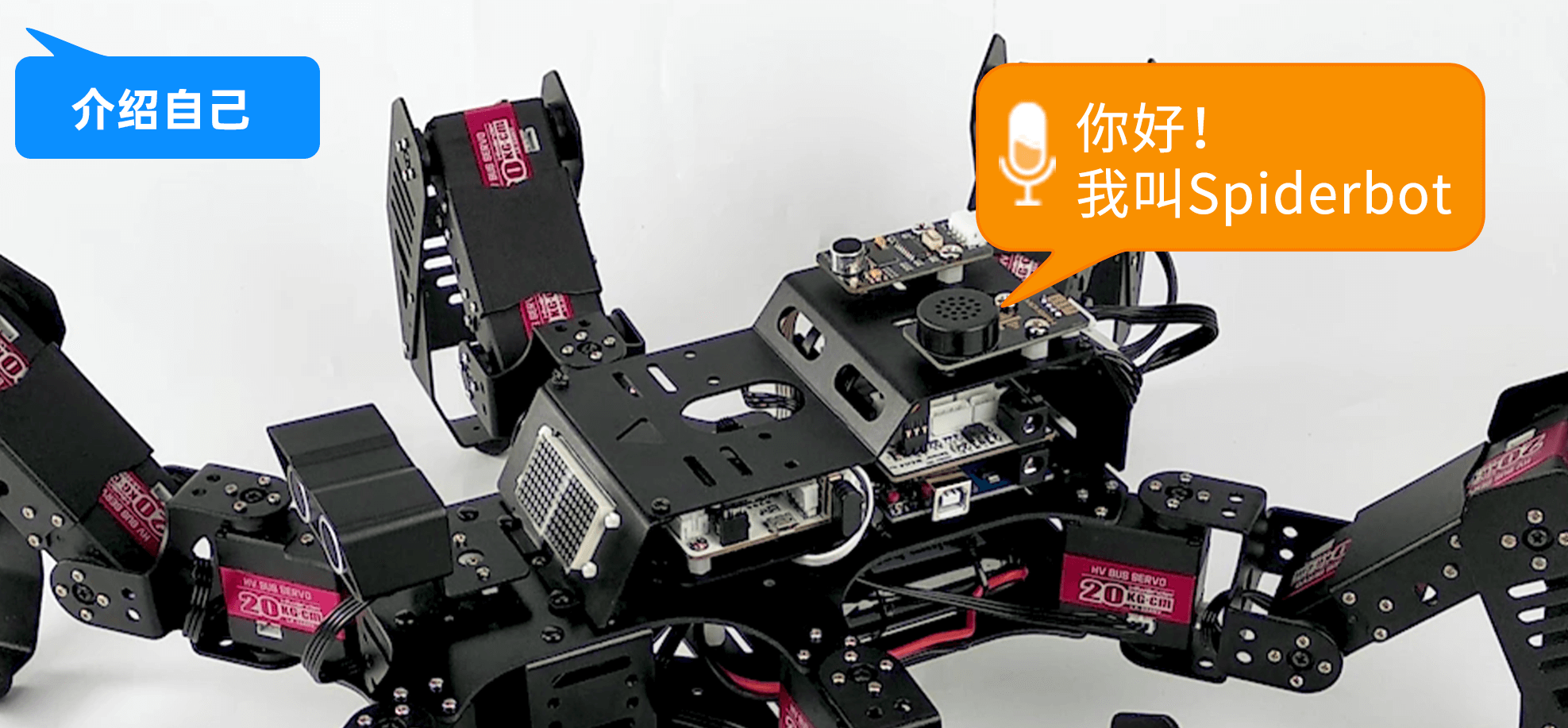
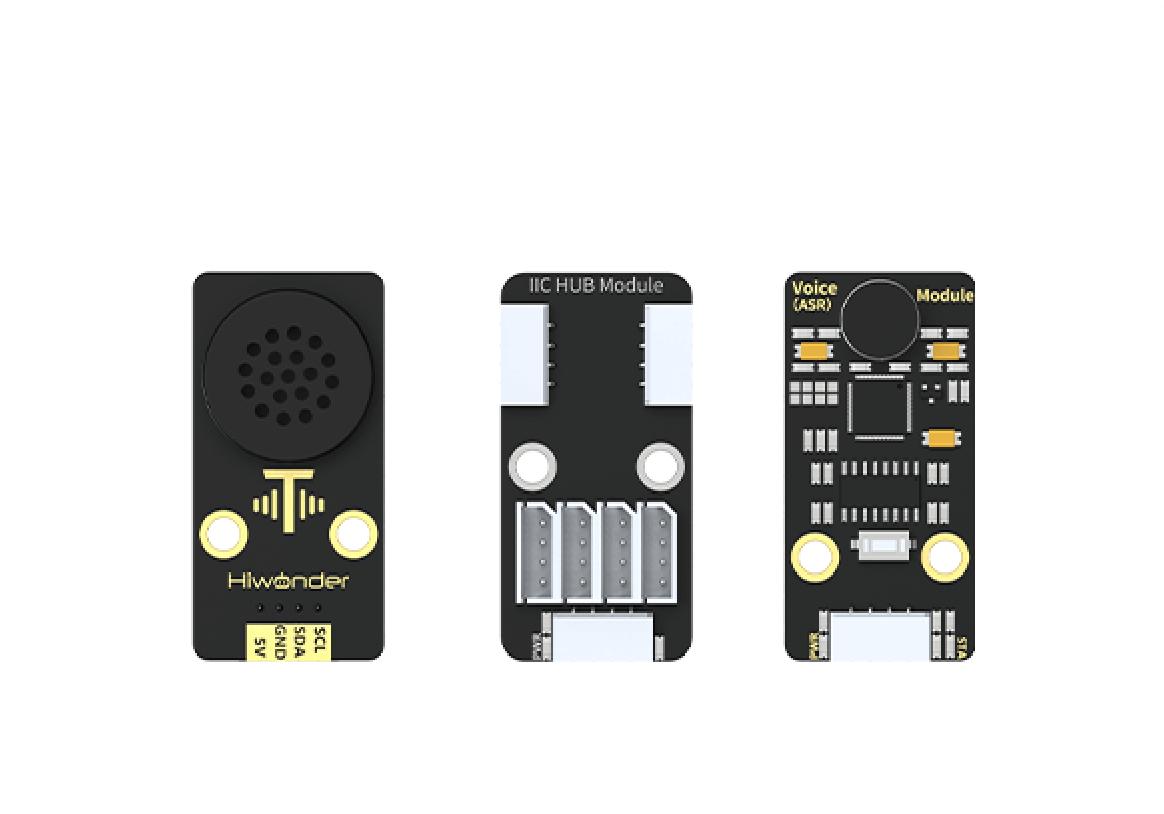
智能语音交互
搭载语音识别模块和语音合成模块,可根据编辑的语音口令,实现智能语音交互。
-

发光/检测二合一超声波
发光超声波高精度、盲区小,不仅具有检测功能,还可以通过编程实现变化灯光颜色。
-

智能点阵显示
机身搭载8*16LED点阵模块,可显示机器人机体状态和各项数据,也可自定义显示内容。
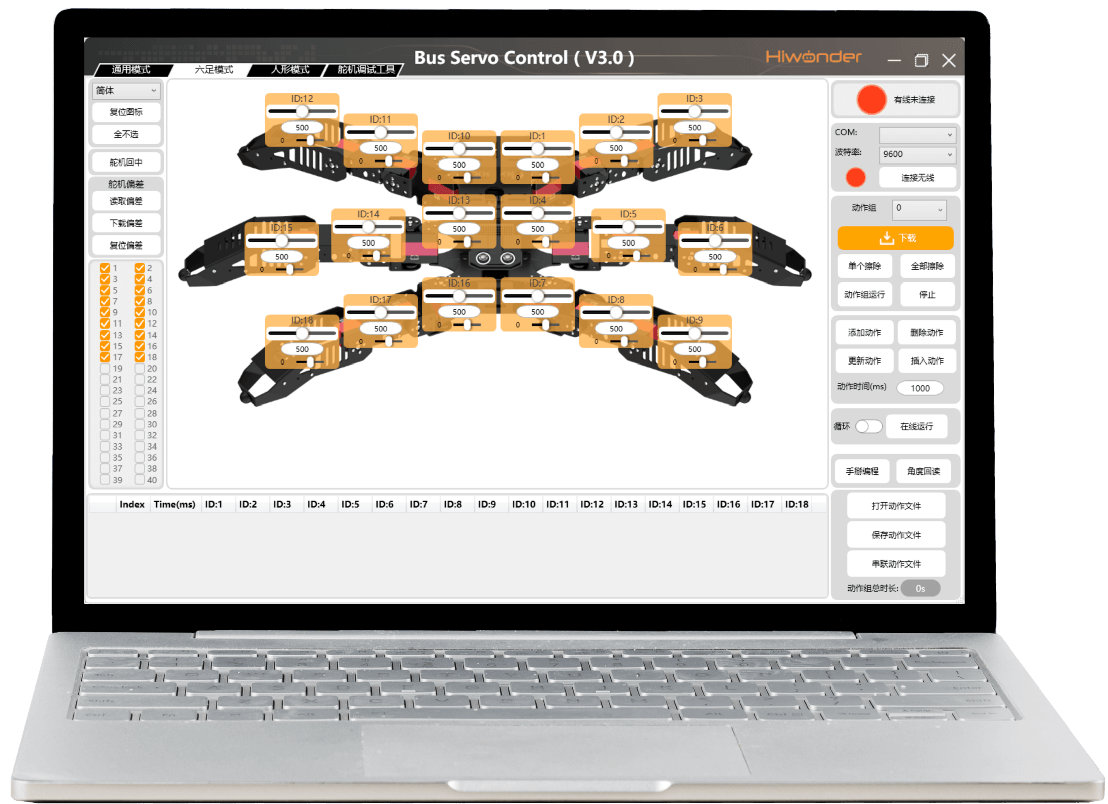
动作组编辑软件
提供图形化上位机软件,拖动滑竿即可控制机器人舵机转动,无需代码,即可编辑机器人动作组。

3种控制方式
Spiderbot支持手机App、PC上位机、手柄3种控制方式。
-

手机App控制
-
PC上位机控制
-
手柄控制
教程详细,开放源码
教程详细
我们准备了多个教程和海量资料,教程由浅入深,让用户轻松的学习机器人的智能控制,更方便的学习机器人编程知识。
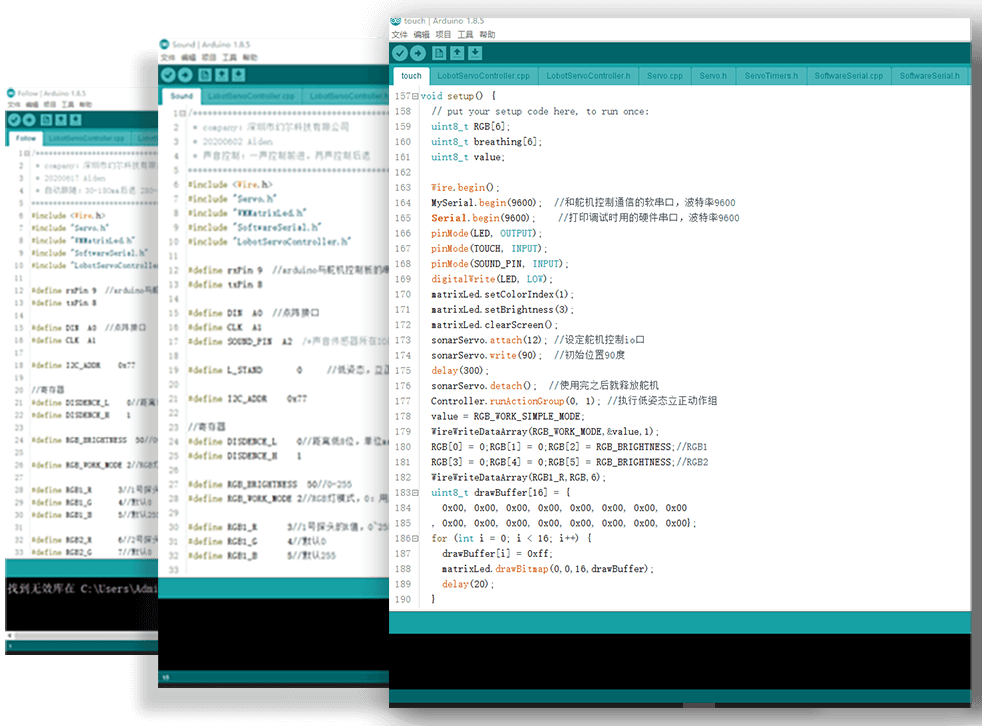
开放Arduino源码
您可以使用Arduino IDE来对Spiderbot机器人进行二次开发,我们为您提供二次开发玩法的源代码,并对代码做了详细注释,方便您去学习。
教程详细,开放源码
提供众多功能拓展配件

语音交互拓展包
参数详情
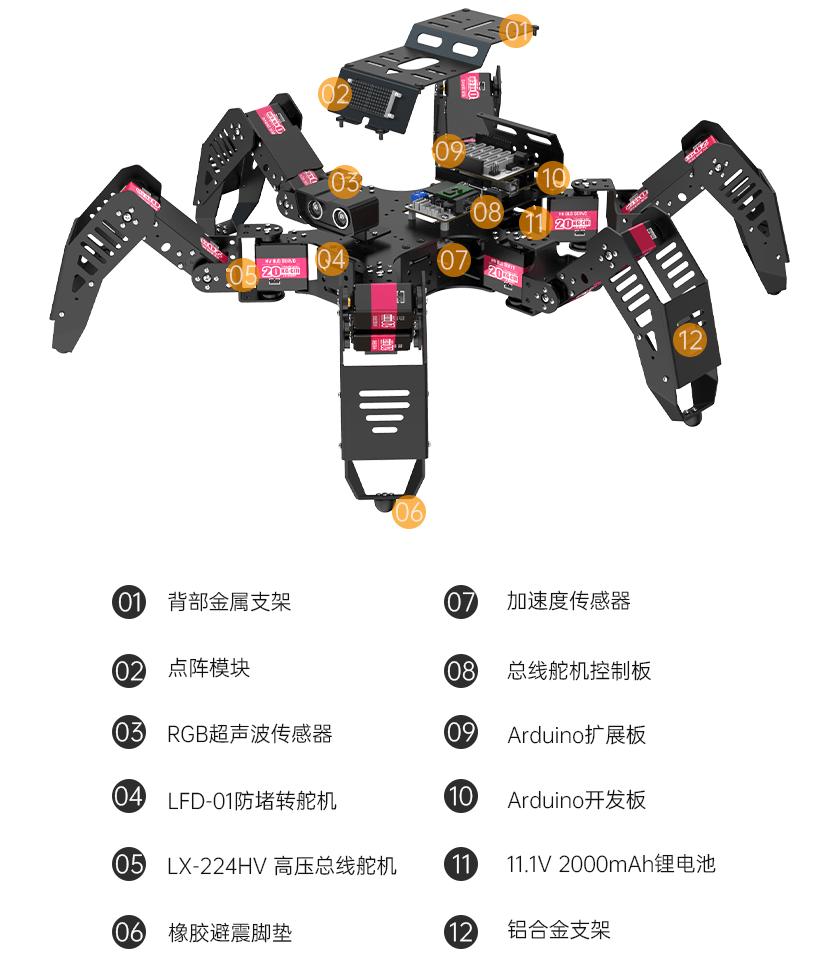
| 机体尺寸 | 单条腿长225mm,展开尺寸长*宽695*614mm |
| 机体重量 | 约2.35kg |
| 机体材料 | 采用金属和玻璃纤维板混合而成 |
| 超声波测距 | 2~400cm |
| 云台角度 | 水平方向180° |
| 电池 | 11.1V 2000mAh 10C高压锂电池 |
| 续航时间 | 持续运行1.1小时~1.4小时 |
| 自由度 | 3个DOF(每条腿)×6 |
| 控制系统 | 总线舵机控制器+Arduino二次开发控制器 |
| 配套软件 | PC端可视化上位机软件+Android/iOS手机APP |
| 舵机参数 |
LX-224HV 高压总线舵机 重量:约62g 尺寸:40*20.14*51.10mm 堵转扭矩:20kg/cm 11.1V |
| 控制方式 | 上位机控制/安卓/iOS手机APP控制/手柄控制 |
| 包装尺寸 | 长度*宽度*高度 400*400*170mm |
| 整体重量(含包装) | 约3.65kg |
