


原创造型,专利设计


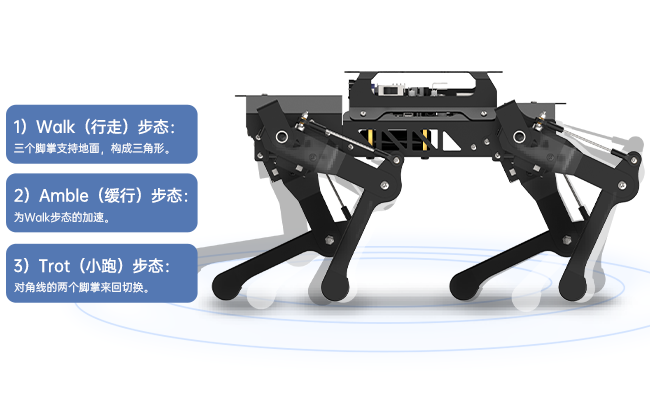
步态规划,自由调节
通过调节PuppyPi每条腿的触地时间、离地时间、离地高度,以及调节前后腿周期间隔时间,能实现Walk、Amble、Trot等多种步态。
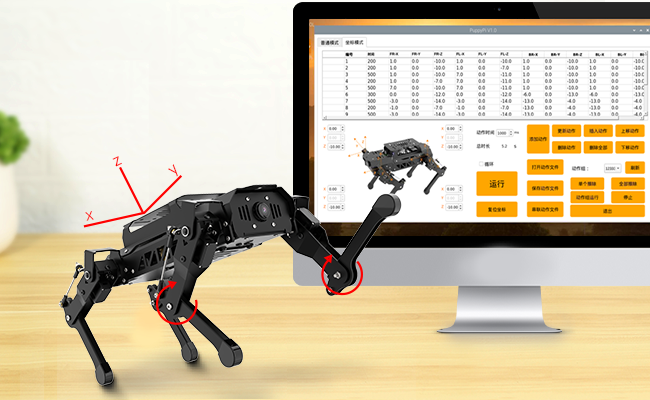
逆运动学,连杆逆解
提供可视化动作编辑上位机软件,用户可以自行设置每条腿末端坐标,机器人通过运动学逆解,计算出每个舵机的角度,从而可以方便快捷的调试出更多有趣的动作。
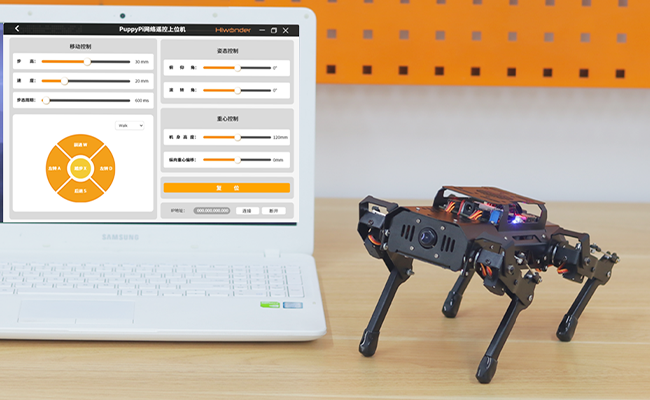
行走速度、高度、倾斜度自由调节
PuppyPi四足机器狗支持一边走一边调节高度和倾斜度,俯仰角、滚转角皆可无极调节,一边走一边转弯,可以任意组合调节。
机身自平衡
PuppyPi机身内置IMU传感器,可以对机体姿态进行实时监测,从而调整腿部关节,让机身保持平衡的状态。

视觉识别,目标追踪,创意无限
PuppyPi头部内置高清广角摄像头,可以识别并定位不同的目标物,从而实现视觉巡线、自主攀爬、人脸检测、自主踢球、目标追踪、标签识别等创意AI玩法。
-
视觉巡线
-
自主攀爬
-
人脸检测
-
自主踢球
-
目标追踪
-
标签识别
-

PuppyPi通过OpenCV可以识别黑、红线条,然后计算出线条的位置,从而调整行走步态,实现自主视觉巡线。
-

PuppyPi通过识别台阶障碍的位置,从而调整自身机体姿态和动作,步态也自主切换,从而实现攀爬越障。
-

PuppyPi通过OpenCV来加载训练好的人脸检测模型,当识别到人脸时,可以实现有趣的人机交互玩法。
-
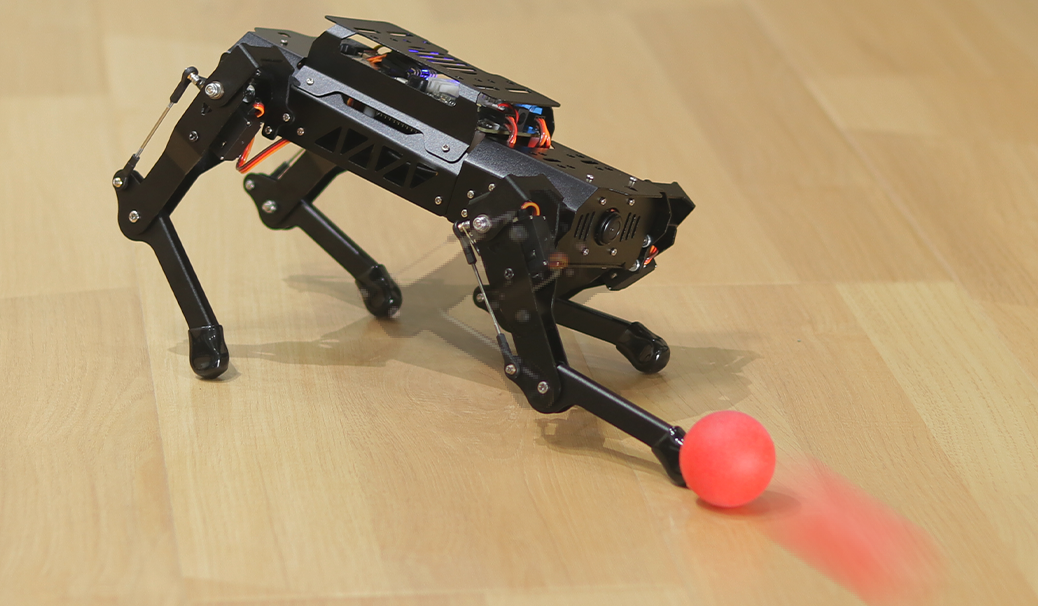
通过OpenCV可以获取小球的位置,然年通过PID算法对小球进行实时追踪进而根据小球距离和位置,自主进行步态切换,从而实现自主踢球。
-

PuppyPi可以识别色块的位置,并实时调整机体姿态进行跟踪。
-


PuppyPi可以对AprilTag标签进行识别,根据不同标签做出不同动作。
支持APP遥控,FPV高清图传
幻尔PuppyPi四足机器狗支持Android和ios双系统APP遥控,通过APP不仅可以实现机体遥控,还能看到机器狗的第一视觉画面。
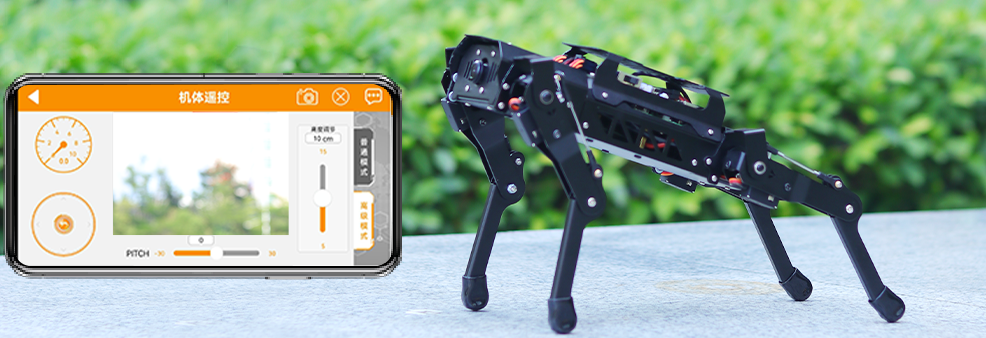
眼随身动,视角广阔
通过APP,可以随心所欲控制机器人移动
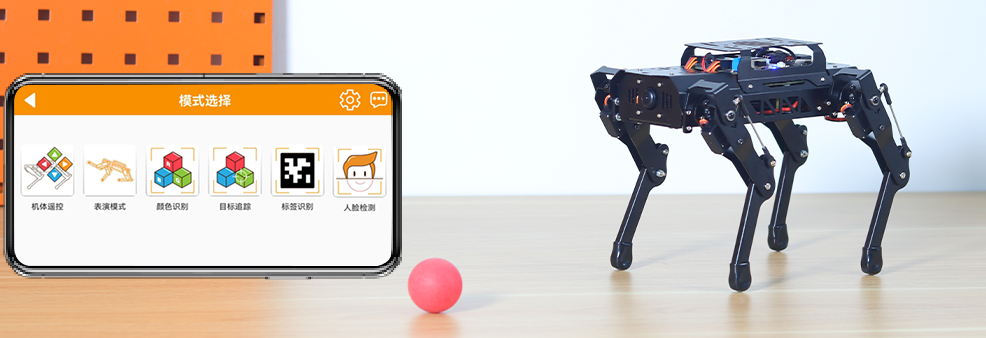
极速体验AI玩法
可以快速切换PuppyPi功能模块,如颜色识别、 目标追踪、视觉巡线、自主避障等,极速体验AI玩法。

PuppyPi第一视觉, 高清图传
PuppyPi支持局域网和WiFi直连模式,通电即可连接WiFi热点进行遥控。
可以将第视觉回传到APP操控界面, 让遥控体验变得更加刺激和真实!
SLAM建图导航 路径规划
-
激光雷达拓展
-
多种建图方式
-
多点导航
-
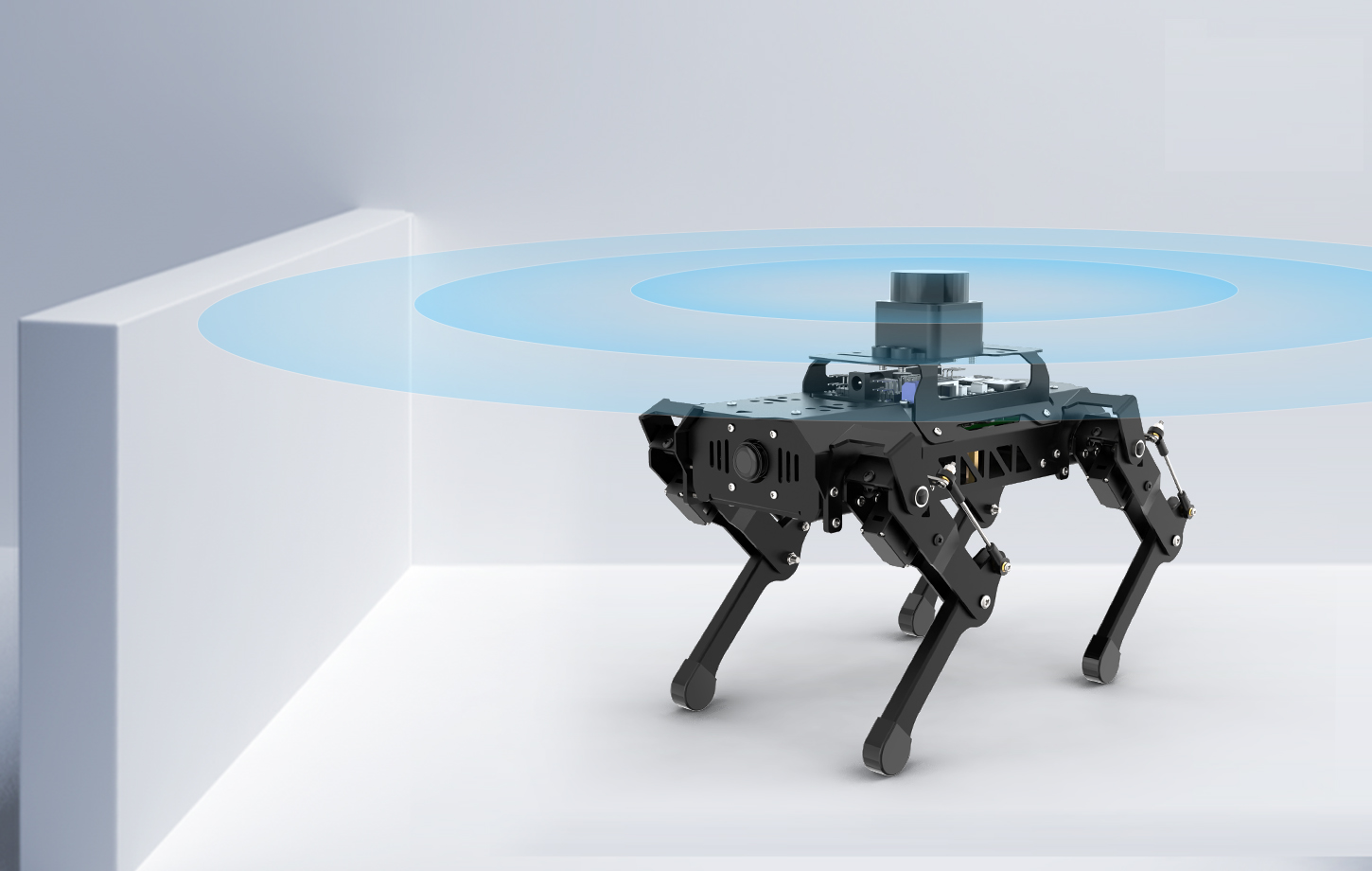
LD19-TOF激光雷达测量半径可达12m,结合PuppyPi,可轻松实现室内SLAM建图导航。
-
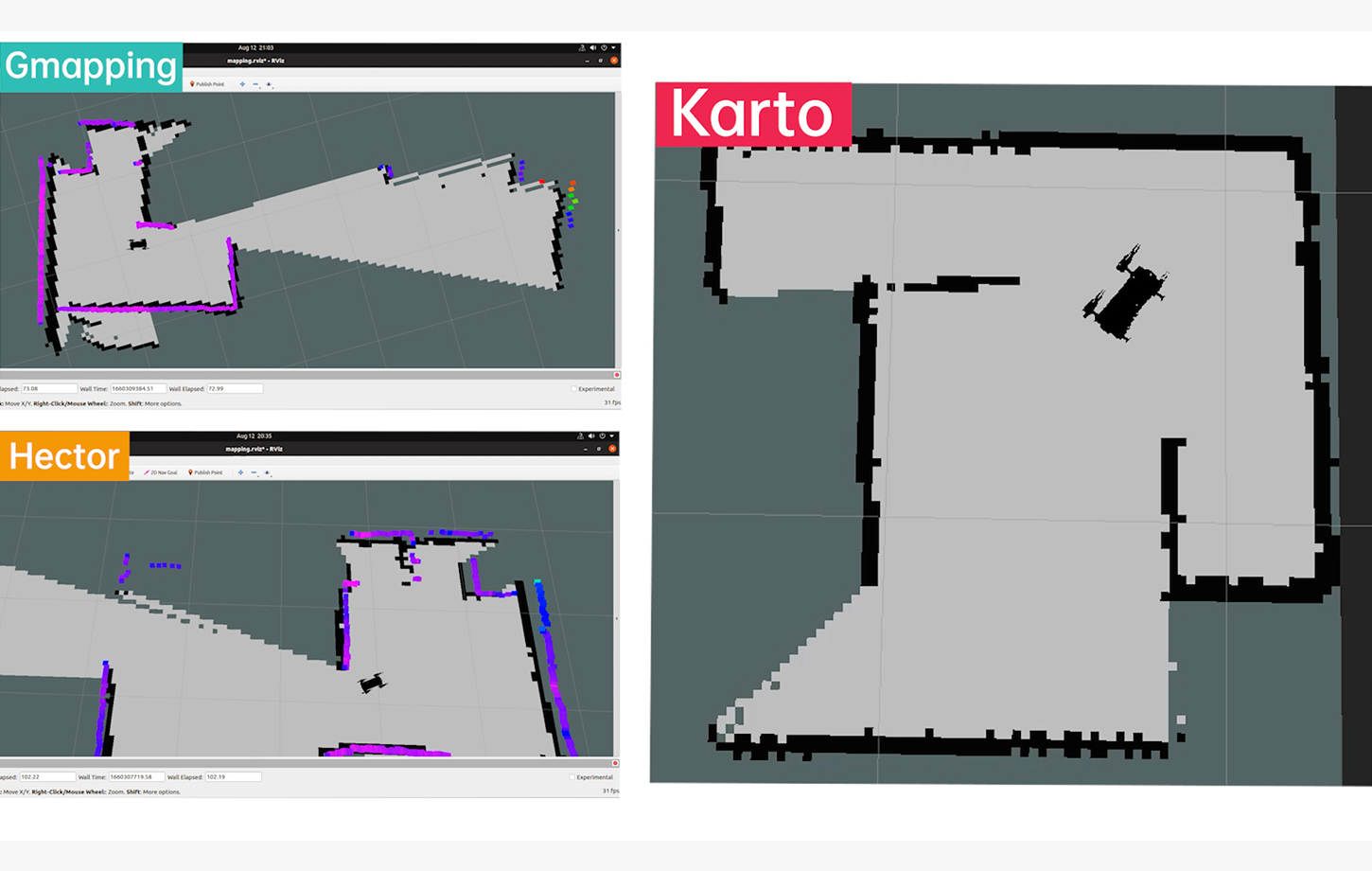
支持Gmapping、Hector、Karto等算法建图,并支持定点导航、多点导航、TEB路径规划。
-
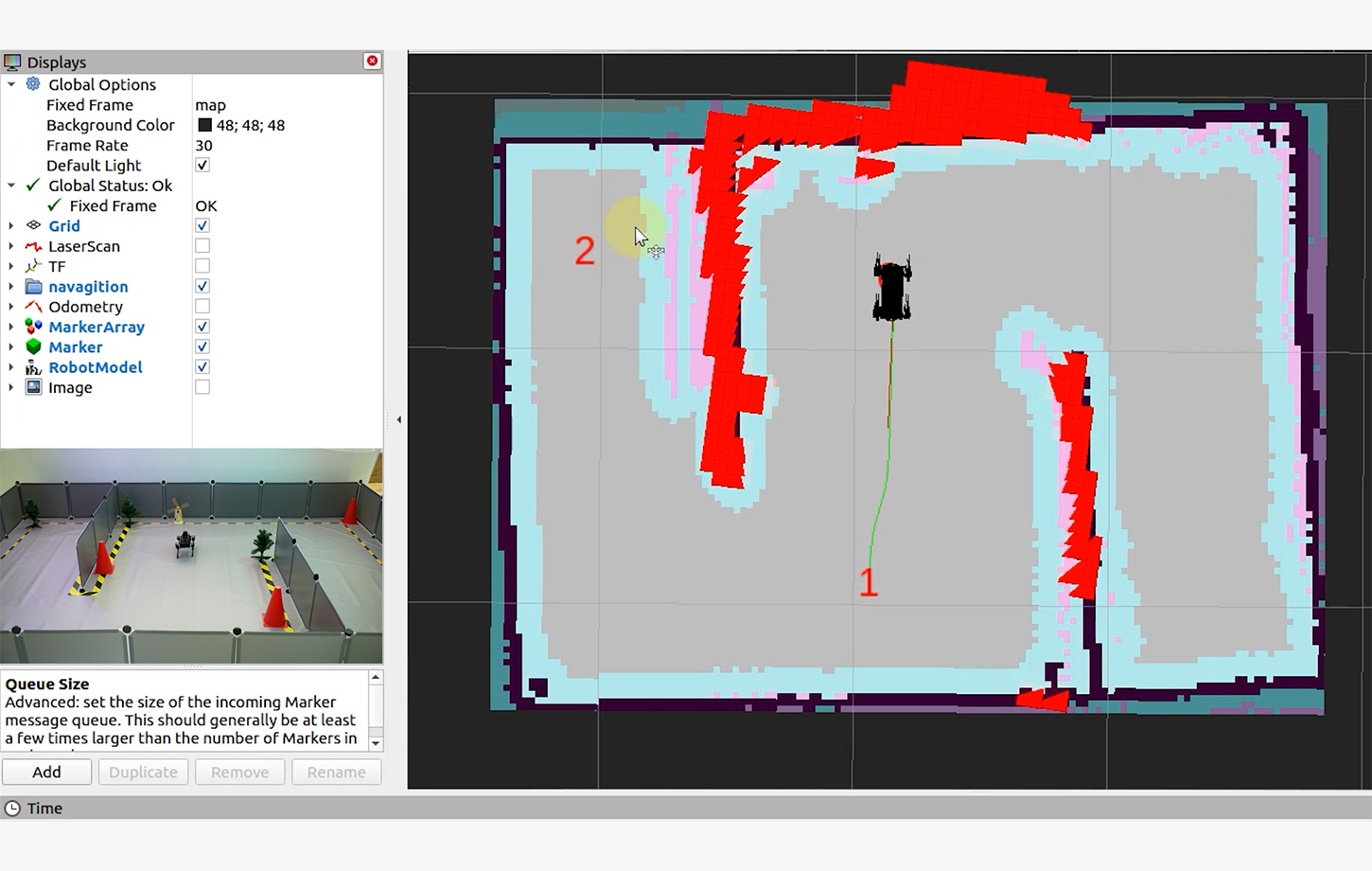
TOF激光雷达可以实时检测周围环境,并在多点导航时,实时规划路径, 避开障碍物。
支持传感器拓展,创造更多可能
PuppyPi也可以兼容语音识别、MP3模块、触摸、点阵屏、超声波传感器等多种电子模块,创造更多天马行空的AI创意项目。
-

发光超声波
-
语音识别模块
-

MP3模块
-
点阵屏模块
-

触摸传感器


语音交互
结合语音识别模块,可以实现语音控制、MP3播报等智能语音交互功能。

测距避障
结合超声波传感器,可以完成对前方障碍进行距离探测。
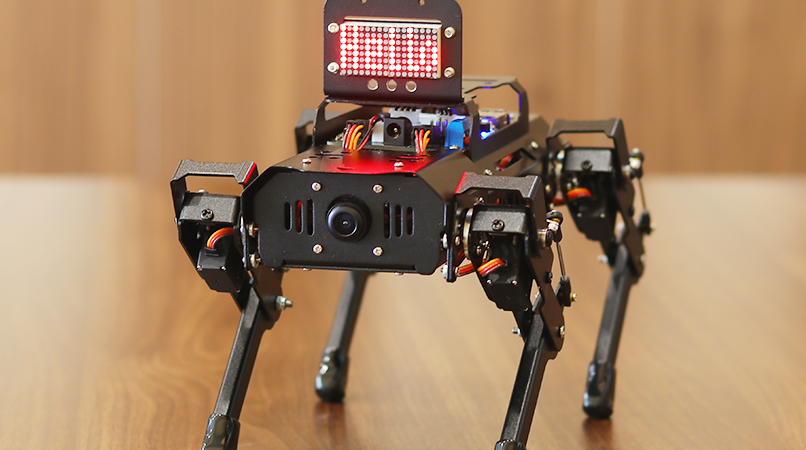
点阵显示
结合点阵模块,PuppyPi可以识别到物品的形状、颜色等信息显示在点阵屏幕上。

ROS机器人操作系统
全球主流机器人通讯框架
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。它的主要目标是为机器人研究和开发提供代码复用的支持。
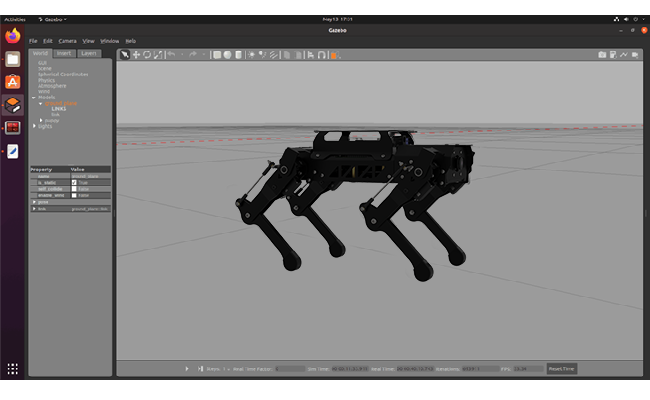
Gazebo仿真
PuppyPi机械狗采用ROS框架开发,并支持GAZEBO仿真,在虚拟环境中进行机械狗的控制及算法的验证,降低了对实验环境的要求,提高了实验效率。
跨平台互联操控
PuppyPi可以使用3种方式进行控制,支持安卓/iOS手机APP控制、PC端控制软件、PS2手柄控制。


手机APP控制
PC端控制

手柄控制
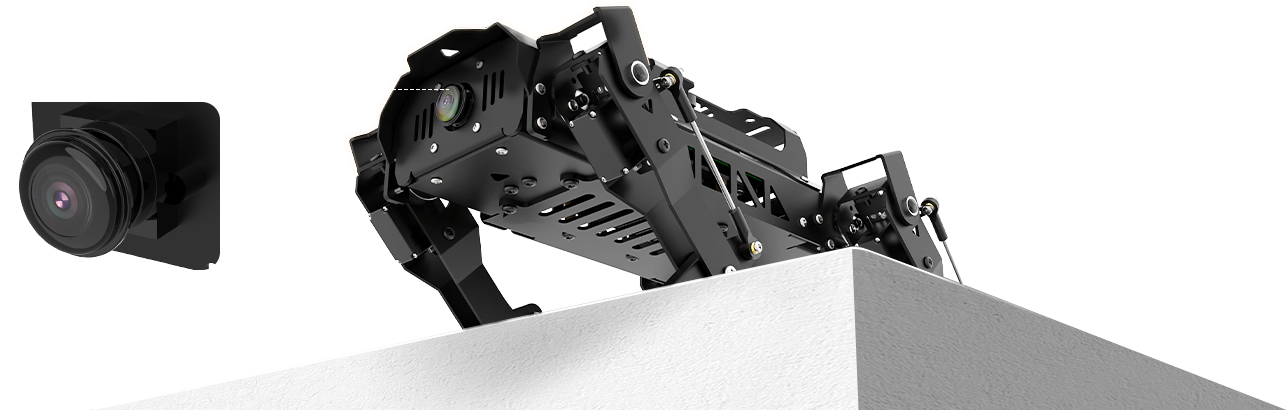
高清120°广角摄像头
PuppyPi搭载全新120°广角高清晰度摄像头,机器人的视觉识别范围更大,摄像头支持手动调焦,使用更方便。


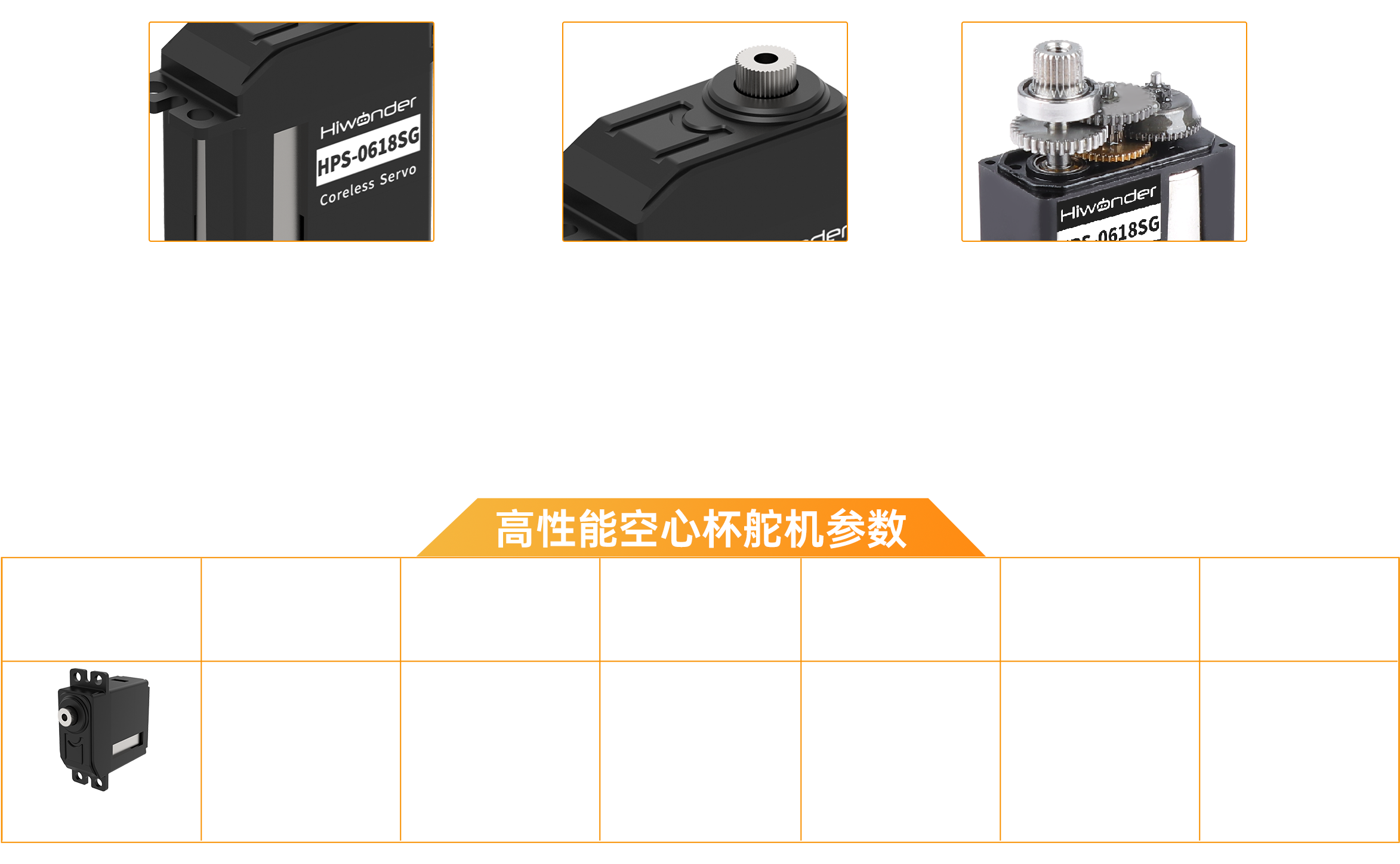
高性能空心杯舵机
PuppyPi采用8KG不锈钢高性能空心杯对接,精度高、效率高,接线便捷,动力强劲!
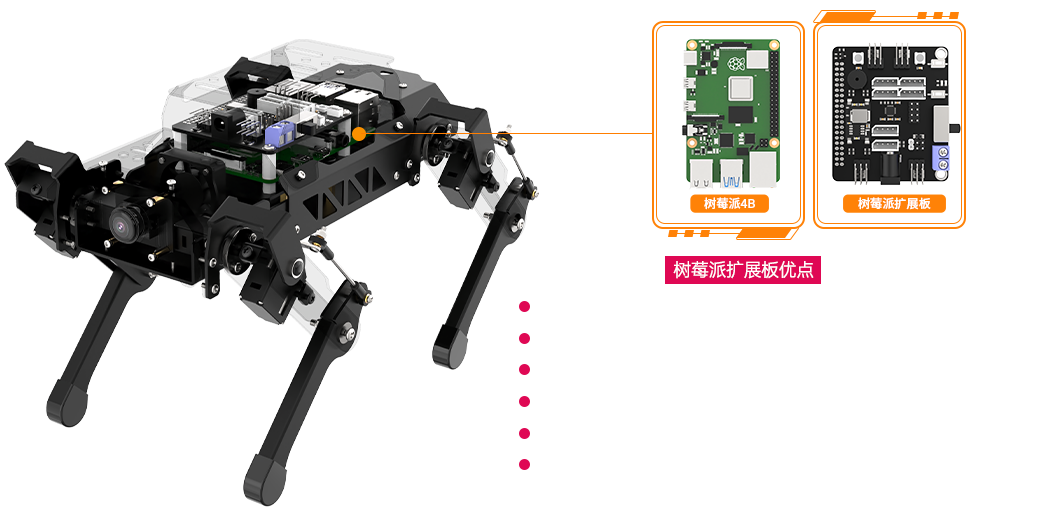
树莓派控制系统
相比上一代树莓派主板,树莓派4B在处理器速度、多媒体性能、内存和连接等方面都有突破性的增长,树莓派4B与树莓派扩展板强强联合,使PuppyPi的Al性能大幅提升!
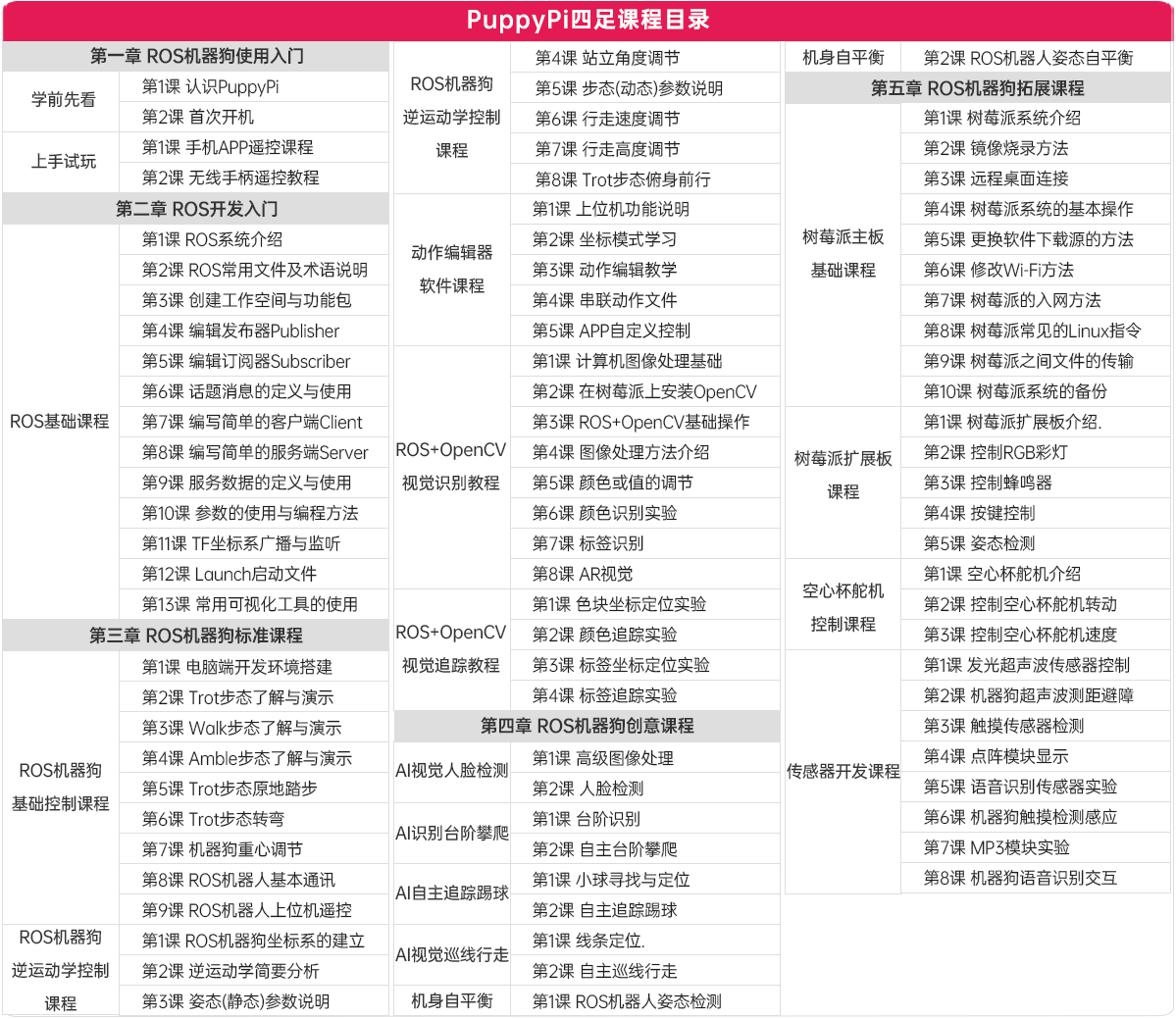
教程详细,开放源码
教程详细
配备精心研发的真人视频课程和丰富的学习资料,内容由浅入深,带您轻松学习。
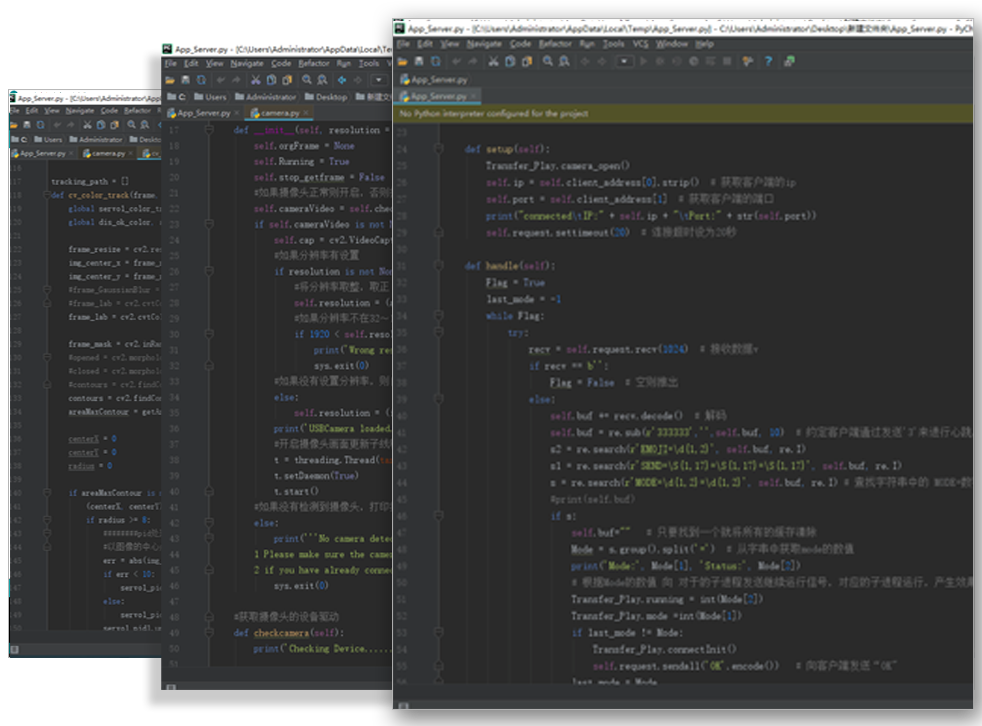
开放Python源码
我们为您提供Python的源代码,并对代码做了详细注释,方便您去学习。
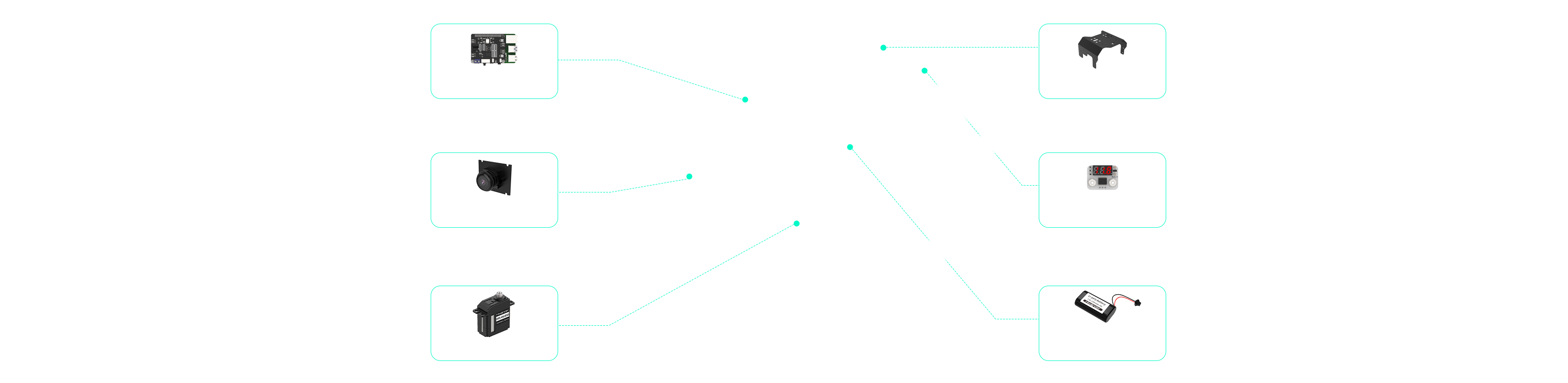
提供众多功能拓展配件



语音交互拓展包
支持幻尔全系列传感器
参数详情
| 机体材质 | 硬铝合金 |
| 摄像头分辨率 | 480P |
| 自由度 | 8自由度 |
| 电池 | 7.4V 2200mAh 高倍率锂电池 |
| 控制系统 | 树莓派4B(4G)控制板和树莓派扩展板 |
| 配套软件 | 手机APP+PC遥控上位机+PC动作编辑上位机 |
| 舵机参数 | HPS-0618SG高性能空心杯舵机 |
| 控制方式 | PC控制/手机APP控制/手柄控制 |
| 机体尺寸 | 长度*宽度*高度 226*149*190mm |
| 机体重量 |
约720g |
| 包装尺寸 | 长度*宽度*高度 315*315*165mm |
| 整套重量(含包装) |
约1.5kg |
